利用多张GPU训练
助教课:利用多张GPU训练大型语言模型—从零开始介绍DeepSpeed、Liger Kernel、Flash Attension_哔哩哔哩_bilibili
助教越看越帅.......
这节主要讲如何降显存
Overview
Introduce
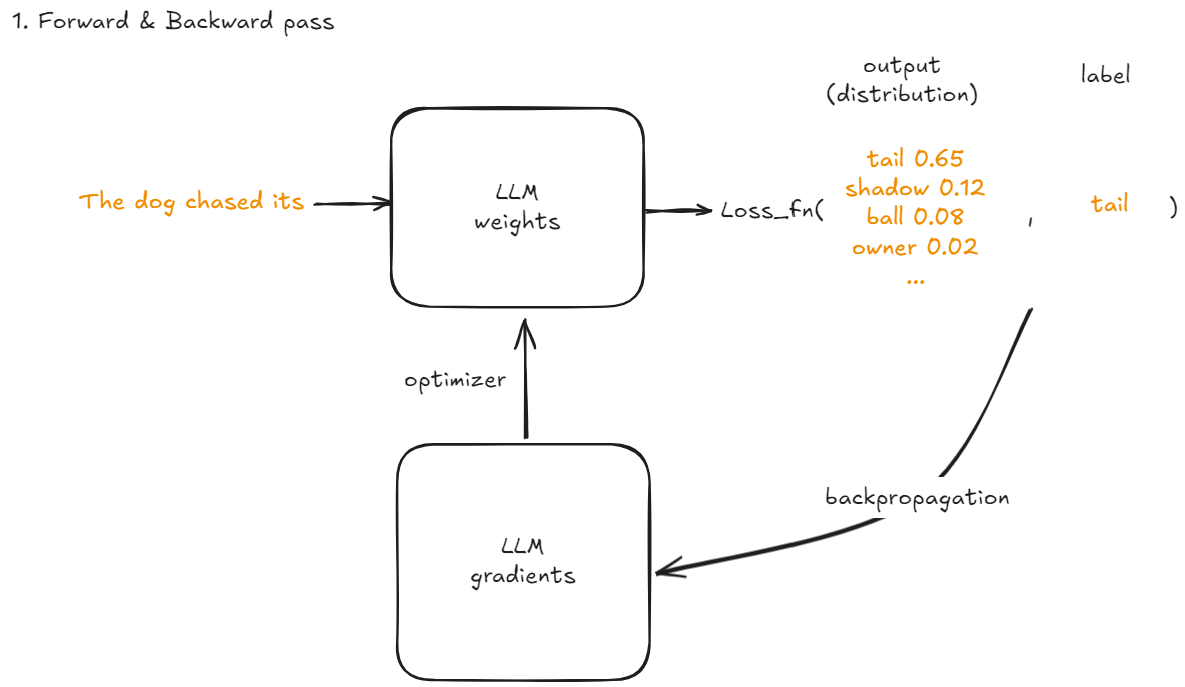
Forwarded & Backward pass
Memory needed
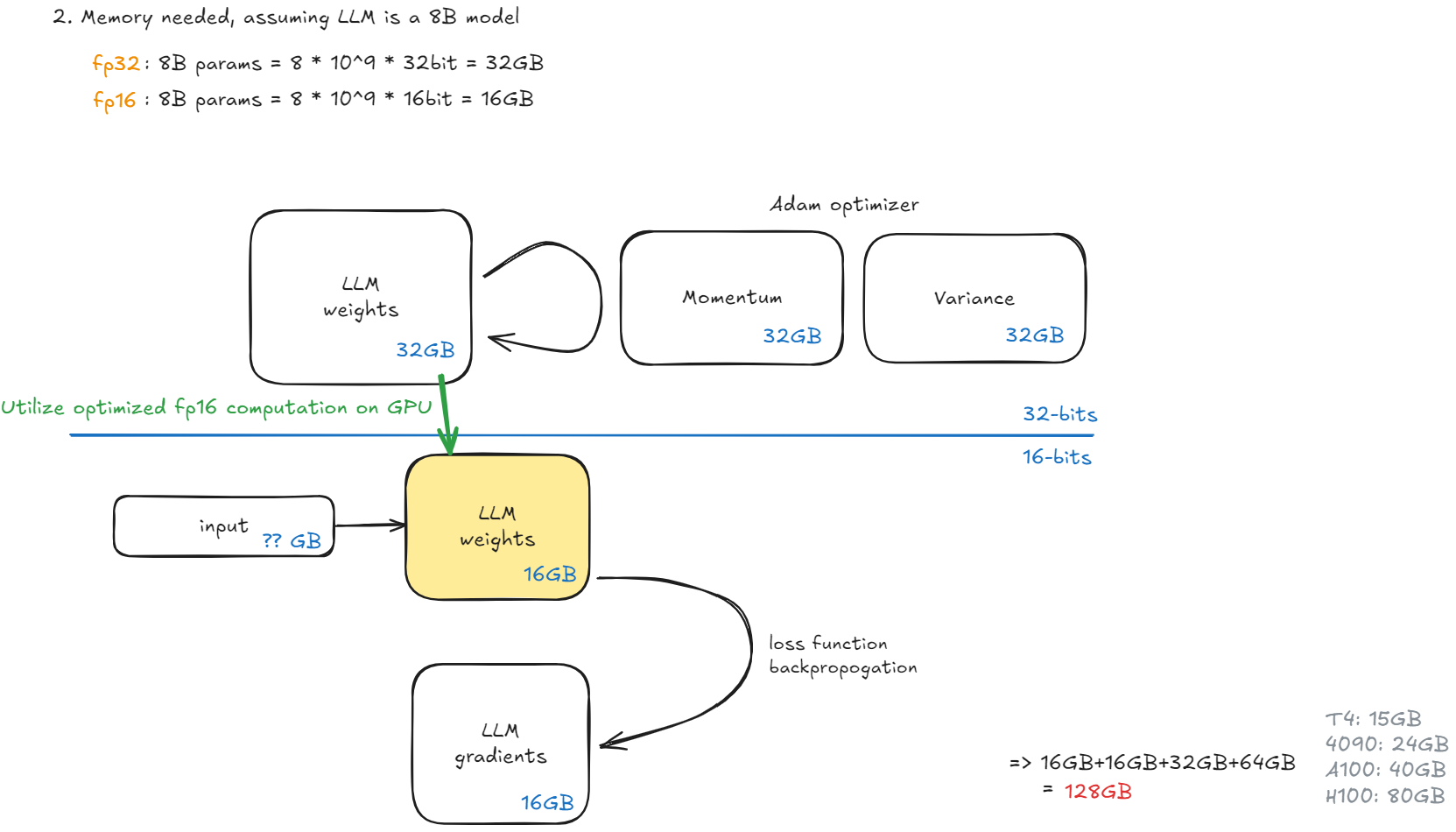
要估算训练一个 8B(80 亿参数)模型所需的 GPU 内存(显存)(不考虑输入,使用混合精度训练 + Adam 优化器):
“不考虑输入”,就暂时忽略激活内存
激活值内存取决于 batch size、序列长度、模型结构等
1. 模型参数(Parameters)
- 每个参数在混合精度训练中通常以 float16 (2 bytes) 存储用于前向/反向计算。
- 但为了优化器状态和更新,通常仍需保留一份 float32 (4 bytes) 的主副本。
所以:
- float16 参数:8B × 2 bytes = 16 GB
- float32 主参数(用于优化器):8B × 4 bytes = 32 GB
注意:有些实现(如 PyTorch 的 AMP + Adam)会将模型参数本身保持为 float32,但在前向/反向中使用 float16 的副本。因此,参数本身通常仍占 32 GB。
2. 优化器状态(Adam)
Adam 优化器为每个参数维护两个状态:momentum (m) 和 variance (v),通常都用 float32。
- 每个参数需要 2 × 4 = 8 bytes
- 总计:8B × 8 bytes = 64 GB
3. 梯度(Gradients)
- 梯度通常以 float32 存储(即使在混合精度中,梯度也是 float32 用于更新)。
- 8B × 4 bytes = 32 GB
4. 临时缓冲区和其他开销
- 通常额外增加 10–20% 的开销(如通信缓冲区、临时张量等)。
activations
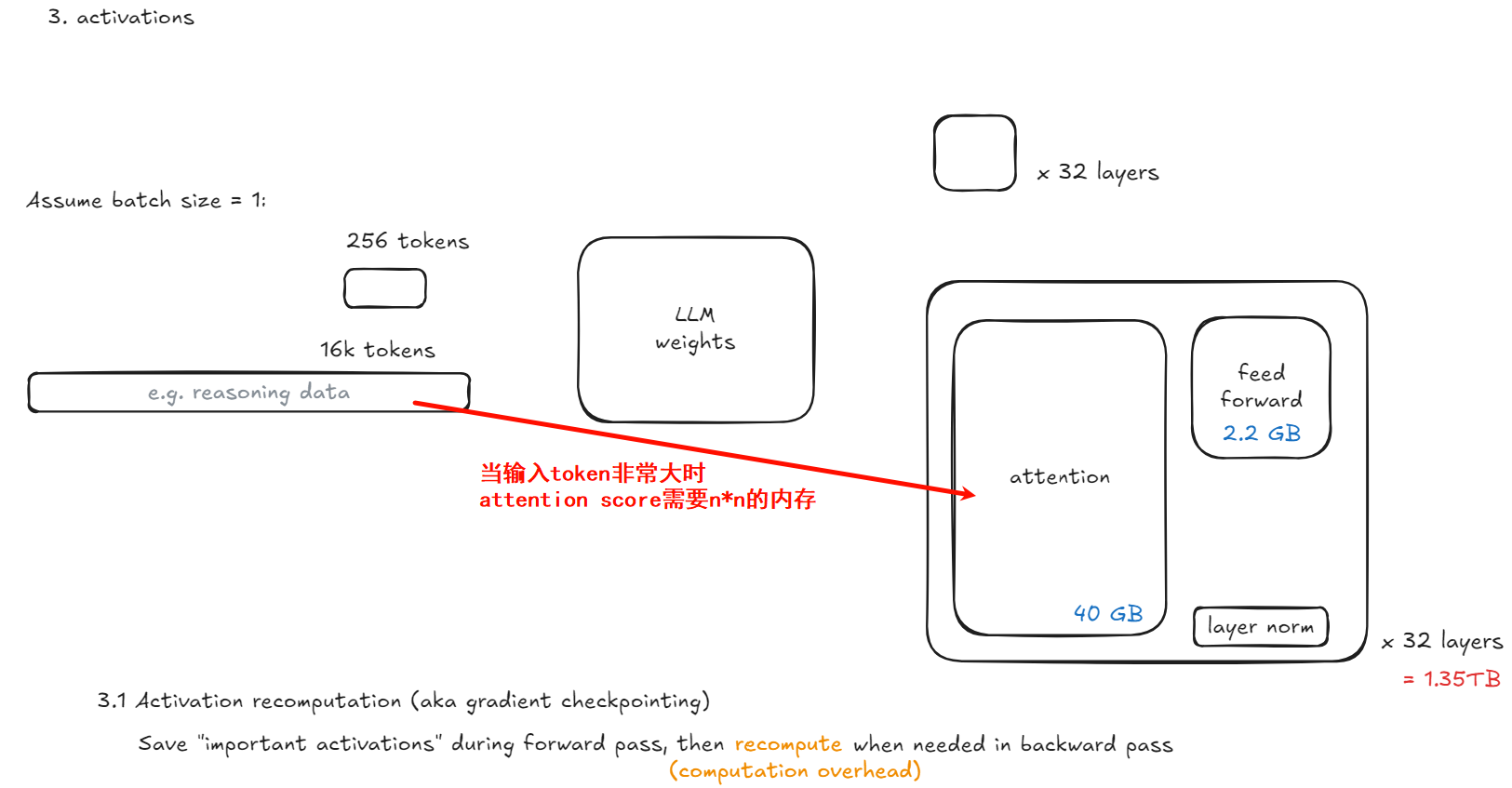
假设条件(基于典型 Transformer 架构)
- 模型总参数 ≈ 8B(80 亿)
- 层数:L = 32
- 隐藏层维度(hidden size):记为 d_model
- 注意力头数、FFN 扩展比例等按标准设计
- 输入 token 数量(即序列长度 × batch size):记为 n
- 使用 混合精度(float16 / bfloat16) 存储激活值 → 每个激活值占 2 bytes
- 暂不考虑 LayerNorm、bias 等小项(可忽略或加 10% 余量)
第一步:估算 d_model(隐藏维度)
对于 8B 参数的 32 层 Transformer,可以反推典型 d_model
一个标准的 decoder-only Transformer(如 LLaMA 架构)每层参数主要来自:
- Attention(多头):Q, K, V, O 投影:4 × d_model²
- Feed-Forward Network (FFN):
- 通常中间维度为 4 × d_model(即 ffn_dim = 4d)
- 两个线性层:d_model × 4d_model + 4d_model × d_model = 8 × d_model²
所以每层参数 ≈ 4d² + 8d² = 12d²
32 层总参数 ≈ 32 × 12d² = 384 d²
设总参数 ≈ 8 × 10⁹:
所以 d_model ≈ 4096 ~ 4608 是合理的,取一个常见值:d_model = 4096
,LLaMA-7B 使用 d_model = 4096,32 层, ≈7B 参数,接近8B,因此这个假设合理。
第二步:每层激活值估算
在训练时,为了反向传播,需要保存前向传播中的中间激活。主要保存的有:
对于每个 Transformer 层(decoder-only):
- Attention 输入:(n, d) → 保存用于残差连接和 LayerNorm
- Q, K, V 投影输出:各 (n, d) → 有些实现会保存,有些会 recomputed
- Attention 输出:(n, d)
- FFN 输入:(n, d)
- FFN 中间激活(如 SiLU/GELU 后):(n, 4d) ← 这是最大的部分
- FFN 输出:(n, d)
但为了简化,常用经验公式是:
每层激活 ≈ (n × d_model) × C,其中 C 是一个常数(通常取 6~10)
==有时还包括 attention softmax 前的 logits:n × n,但若 n 很大则不可忽略==
但 n × n 的 attention score 通常不保存(因为反向时可 recomputed 或用 flash attention),所以我们先忽略 O(n²) 项,除非 n > 2048。
因此,主要激活为:
以 float16 存储 → 每元素 2 bytes:$$ \text{每层激活内存} = 6 n d \times 2 = 12 n d \text
\text{总激活内存} = 32 \times 12 n d = 384 , n d \text
\text{激活内存} = 384 \times n \times 4096 \text{ bytes} = 1,572,864 , n \text{ bytes} \approx 1.57 , n \text
\text{Checkpointed 激活} \approx 3 \times 12 n d = 36 n d \text{ bytes} \approx 0.15 , n \text
batch size
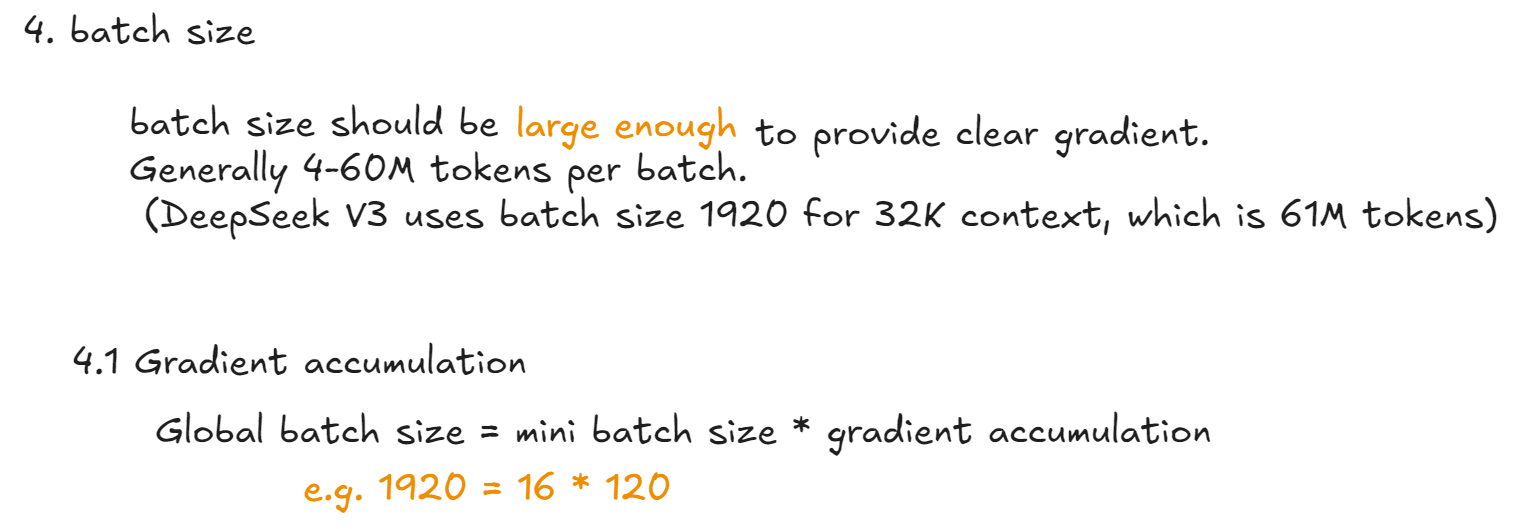
全局 batch size,即每步更新所用的总 token 数
| 术语 | 含义 |
|---|---|
| Mini-batch size | 单次前向/反向传播处理的样本数(受 GPU 显存限制) |
| Gradient accumulation steps (GA) | 多少个 mini-batch 的梯度累加后才做一次参数更新 |
| Global batch size (GBS) | 每次参数更新实际使用的总 token 数 = mini-batch tokens × GA |
在大模型训练中,真正影响优化效果的是 Global Batch Size(以 token 计),而不是 mini-batch。
2. 为什么需要大的 Global Batch Size)?
(1)梯度噪声降低🌟
- 小 batch → 梯度方差大 → 训练不稳定、收敛慢
- 大 batch → 梯度更接近真实期望 → 更平滑的 loss 下降
- 经验表明:LLM 训练中,GBS < 1M tokens 时梯度噪声显著
(2)与学习率协同缩放(Learning Rate Scaling)
- 大 batch 允许使用更大的学习率(线性缩放规则)
- 例如:batch size ×4 → LR ×4(在一定范围内有效)
- 这能加速收敛,提升最终性能
(3)硬件利用率高
- 大 batch 能更好地利用 GPU 计算单元(提高 FLOPs 利用率)
- 减少通信/调度开销占比(尤其在多机训练中)
📌 Chinchilla 论文建议:最优计算分配下,总训练 token 数 ≈ 20× 模型参数
对于 8B 模型 → 总训练 token ≈ 160B ,若每 step 用 6M tokens → 需约 26,666 步
虽然 global batch size 决定优化质量,但 显存只受 micro-batch 影响!
显存主要由以下决定:
- Micro-batch 的 token 数(= per-GPU batch size × sequence length)
- 激活值内存 ∝ micro-batch tokens(见前文公式:≈1.57 × n MB,n 是 per-GPU tokens)
- 优化器状态、参数、梯度与 batch 无关(固定)
策略:为了达到大 GBS,减小 micro-batch,增大 GA,从而控制 per-GPU 显存。
但注意:
- GA 过大会延长训练时间(因为每步要跑 GA 次前向/反向才更新)
- 通信开销增加(每 micro-step 都要 all-reduce 梯度)
所以实践的时候需要先确定硬件能支持的最大 micro-batch(考虑 seq_len 和激活内存)
challenge
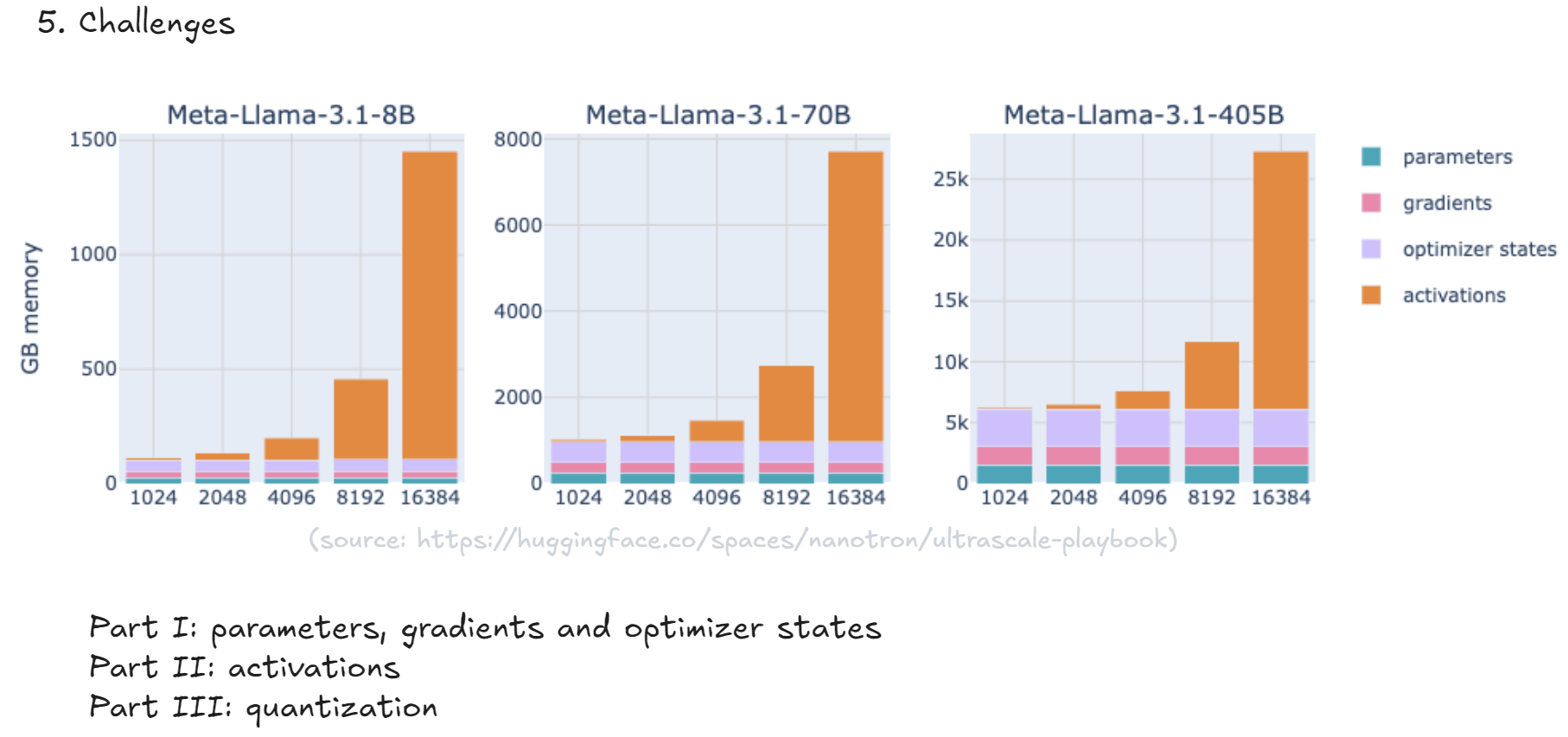
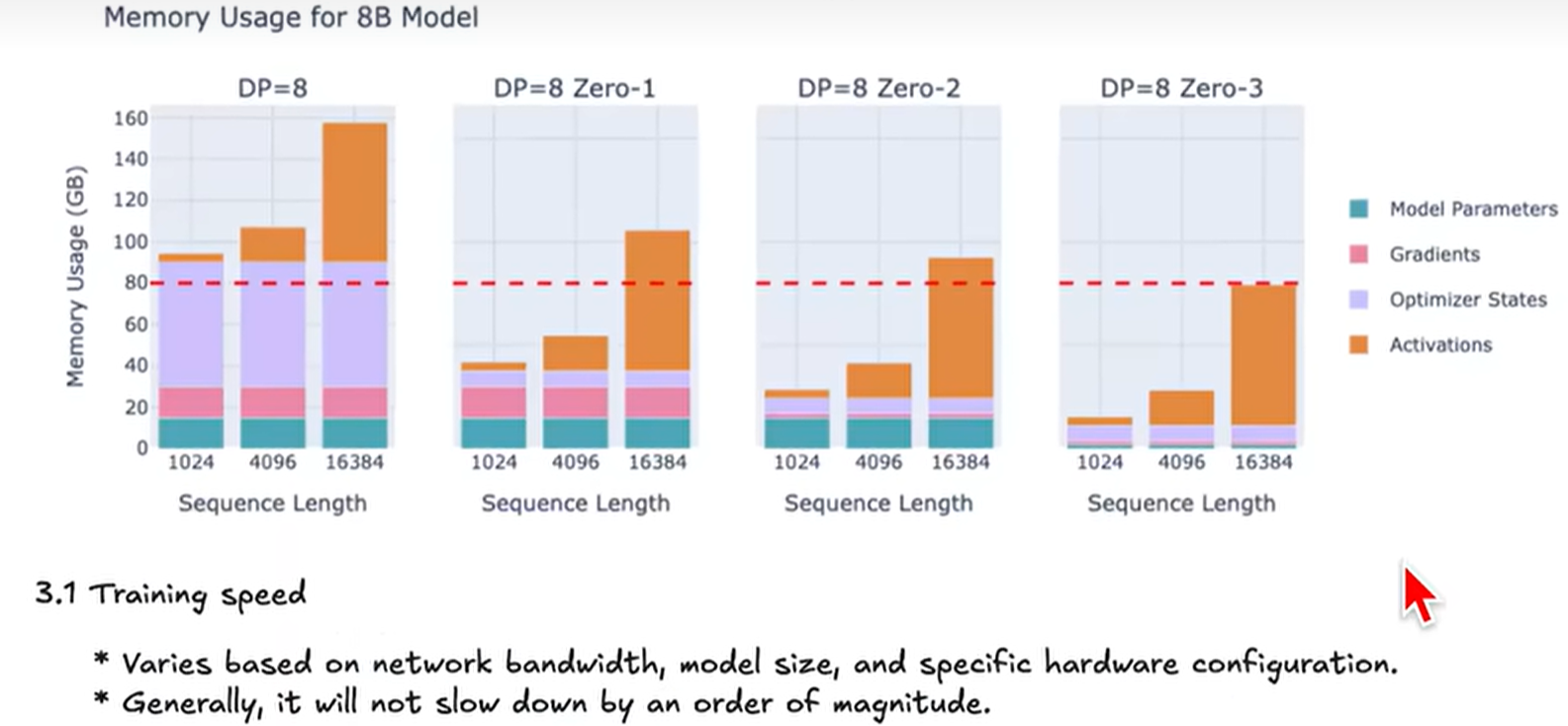
parameters, gradients and optimizer 占用内存大小不会随输入token大小改变而改变,但是activations会随着token加大而指数级增长。
Part I : parameters, gradients and optimizer
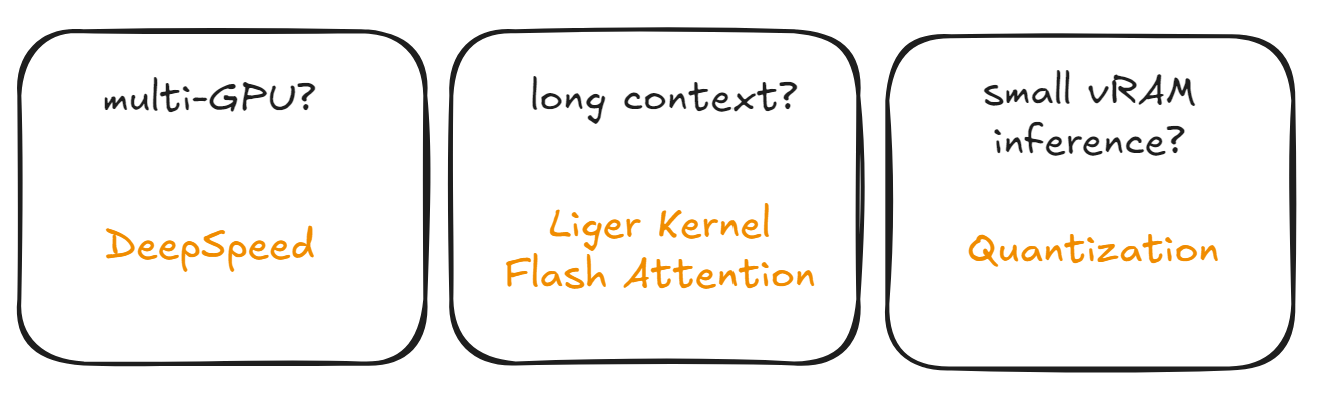
How to leverage multiple GPUs?
- We have to compute billions of optimization steps, with large batch size
- The model may be too large to fit in a single GPU
- The input can be long. Self-attention takes O(N^2) memory.
DeepSpeed - Zero Redundancy Optimizer (ZeRO)
微软开发的一套高效分布式训练优化技术。
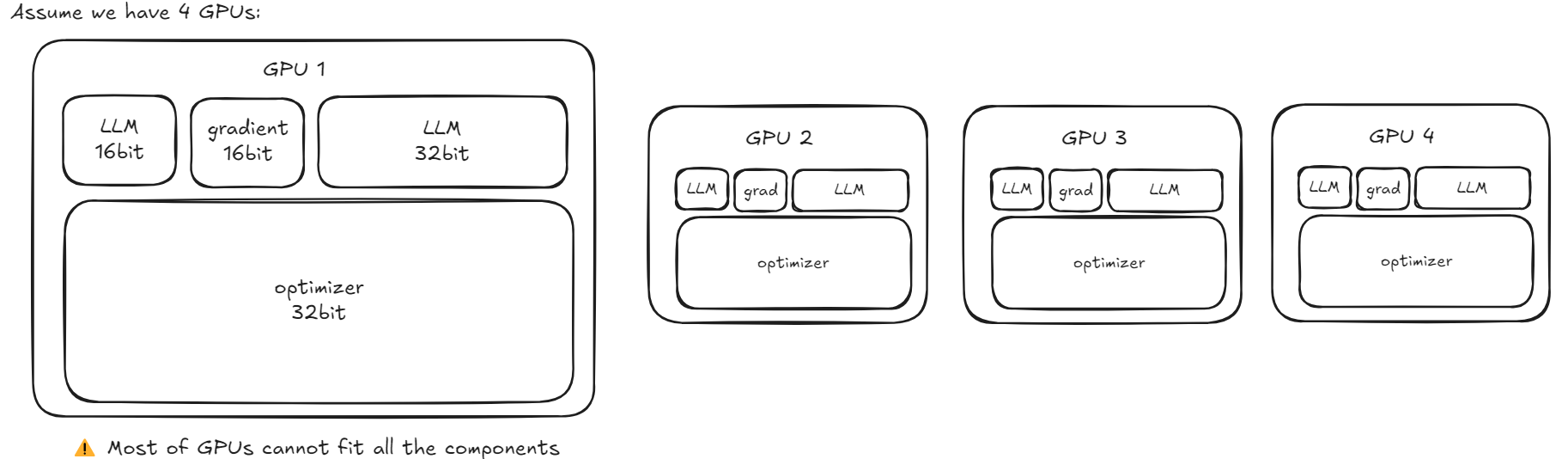
在标准 数据并行(Data Parallelism, DP) ,每个 GPU 都保存一份完整的模型参数、梯度、优化器状态即使你有 8 张 A100(80GB),也无法训练——因为每张卡都要存完整副本;ZeRO 的核心思想: 将优化器状态、梯度、参数在 DP 进程间分片(shard),每个 GPU 只存自己负责的那一部分,从而线性降低显存。
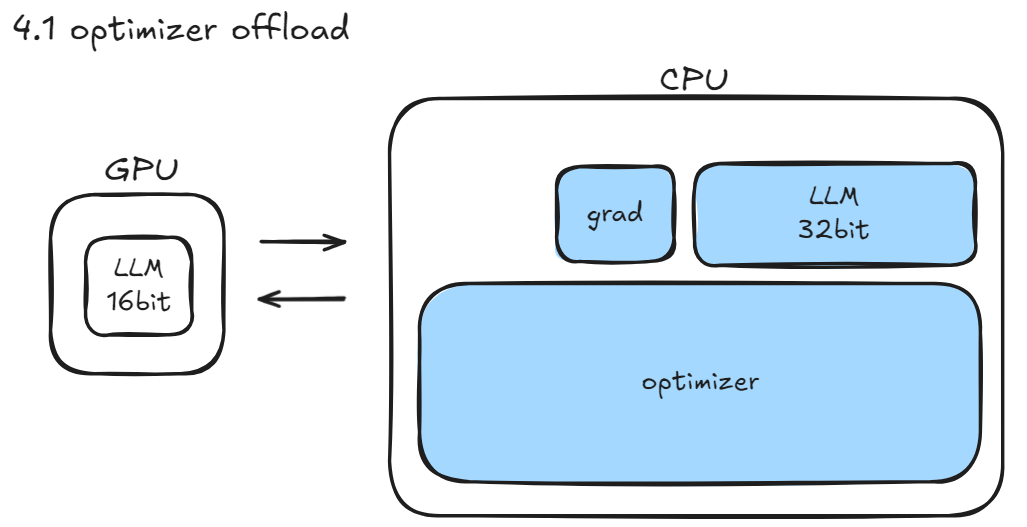
ZeRO-1:分优化器 (通过之前的分析知道 parameters, gradients and optimizer中占显存最大的是optimizer)
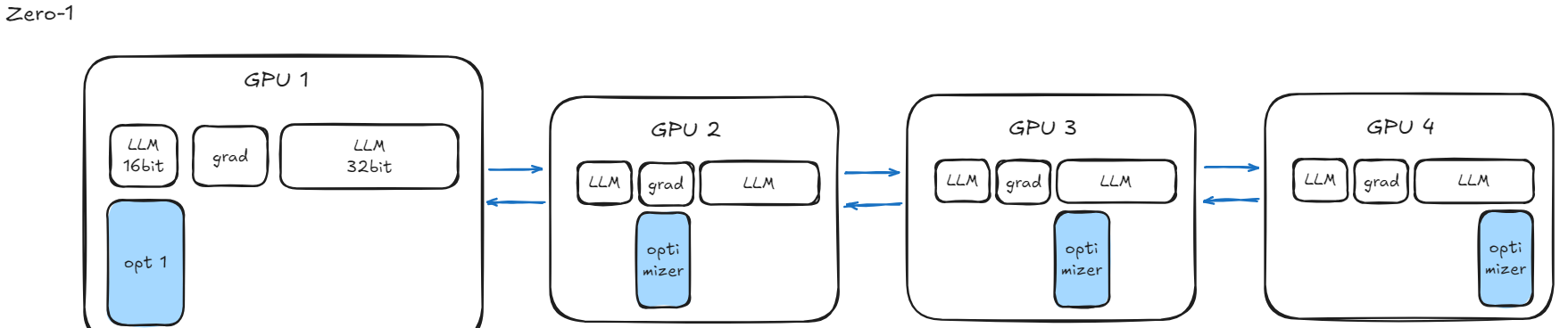
ZeRO-2:+ 分梯度 → 进一步省显存
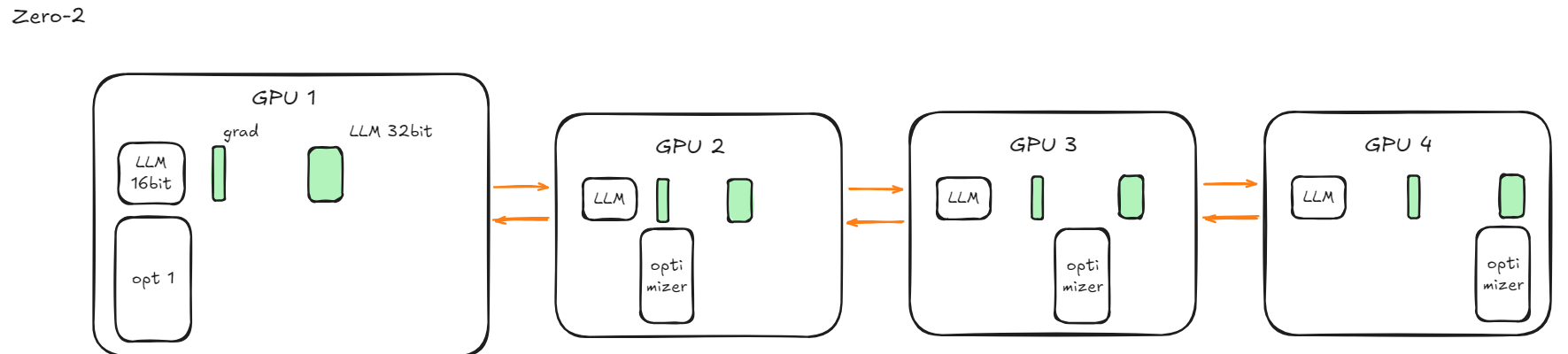
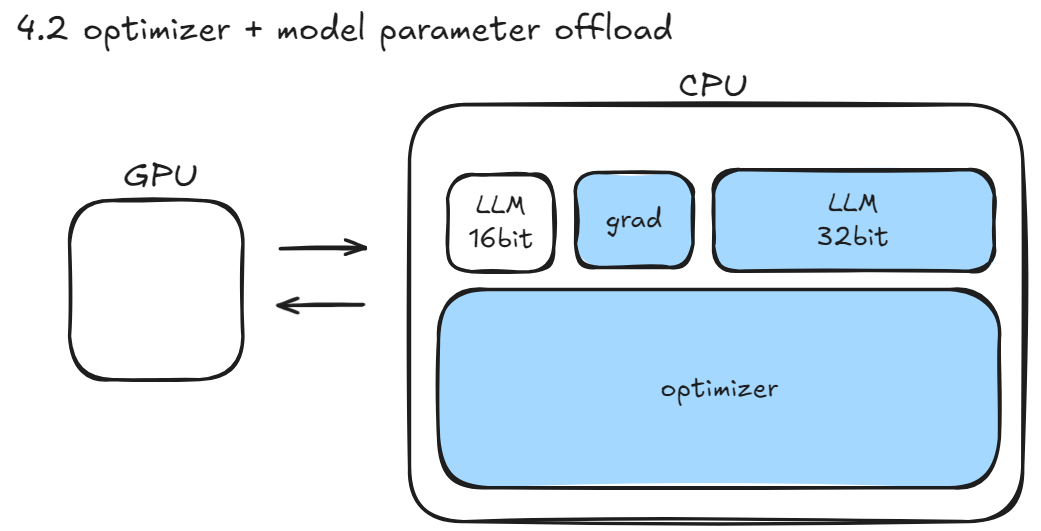
ZeRO-3:+ 分参数
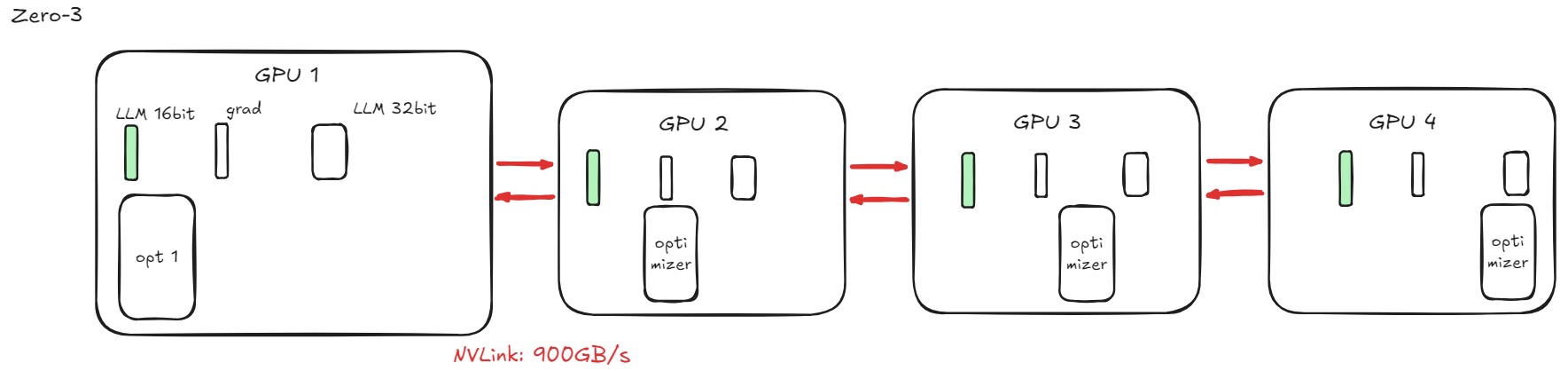
GPU之间传输效率很高,因此使用zero速度不会变很慢
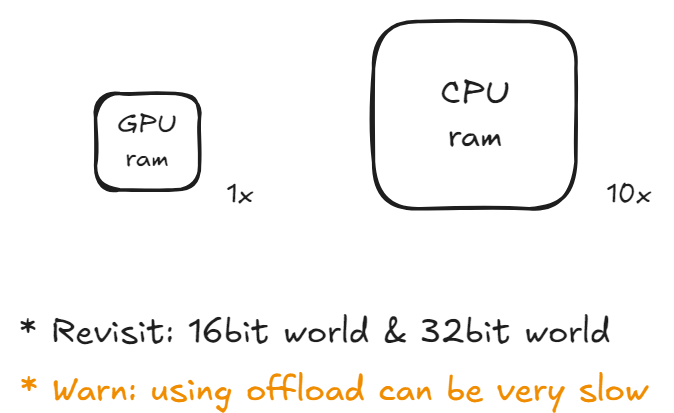
- Offload:用 CPU/NVMe 换 GPU 显存,牺牲速度换可行性(GPU、CPU之传输速率很慢,不推荐使用)
Part II : activations
对于activations,一般是通过改写kernel来解决显存占用过多的问题
“kernel” 并不是神经网络结构中的某一层(比如卷积层、Attention 层),而是指 底层执行计算的基本函数单元 —— 也就是 在 GPU 上实际运行的、完成具体数学运算的代码片段。
| 高层操作(PyTorch) | 对应的底层 kernel 可能是 |
|---|---|
torch.matmul(A, B) | 一个调用 cuBLAS 的 GEMM kernel |
F.silu(x) | 一个 element-wise 的 CUDA/Triton kernel |
| Self-Attention | 由多个 kernel 组成:QKV 投影(matmul)、softmax、attention output(matmul)等 |
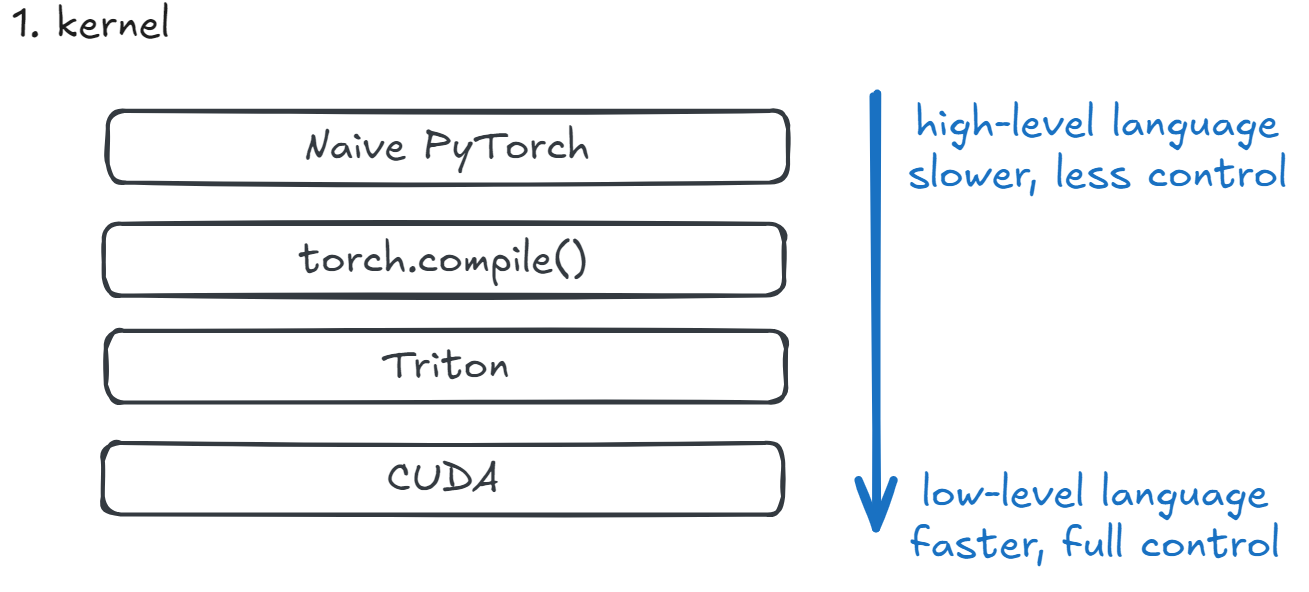
“kernel” 可以有不同实现方式:
| 实现方式 | 示例 |
|---|---|
| Naive PyTorch | 调用 torch.softmax,内部用通用 CUDA kernel |
| torch.compile() | 自动融合 matmul + scaling + softmax 成一个 kernel,减少中间显存 |
| Triton | 手写一个 fused attention kernel(如 FlashAttention 的 Triton 版) |
| CUDA | NVIDIA 工程师写的 cuBLAS GEMM,或 FlashAttention-2 的 hand-tuned CUDA |
大模型训练/推理的瓶颈往往不在“算法”,而在“计算效率”:
- 一个低效的 softmax kernel → 显存爆炸、速度慢
- 一个融合的 matmul+SiLU kernel → 减少 50% 显存读写,提速 2 倍
- 使用 Tensor Core 的 CUDA kernel → 充分利用 A100 的硬件加速
目标减少kernel
Flash Attention Algorithm
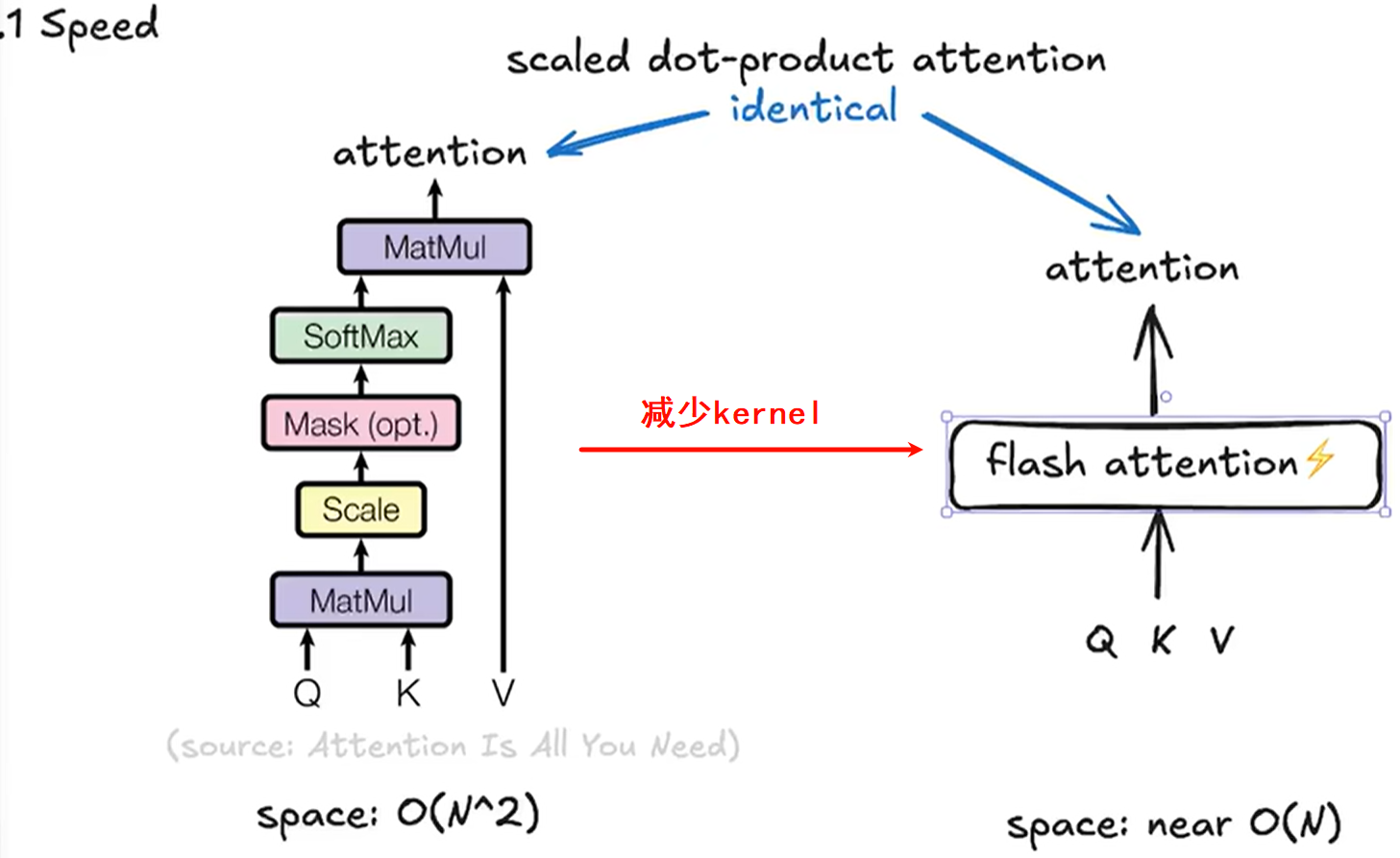
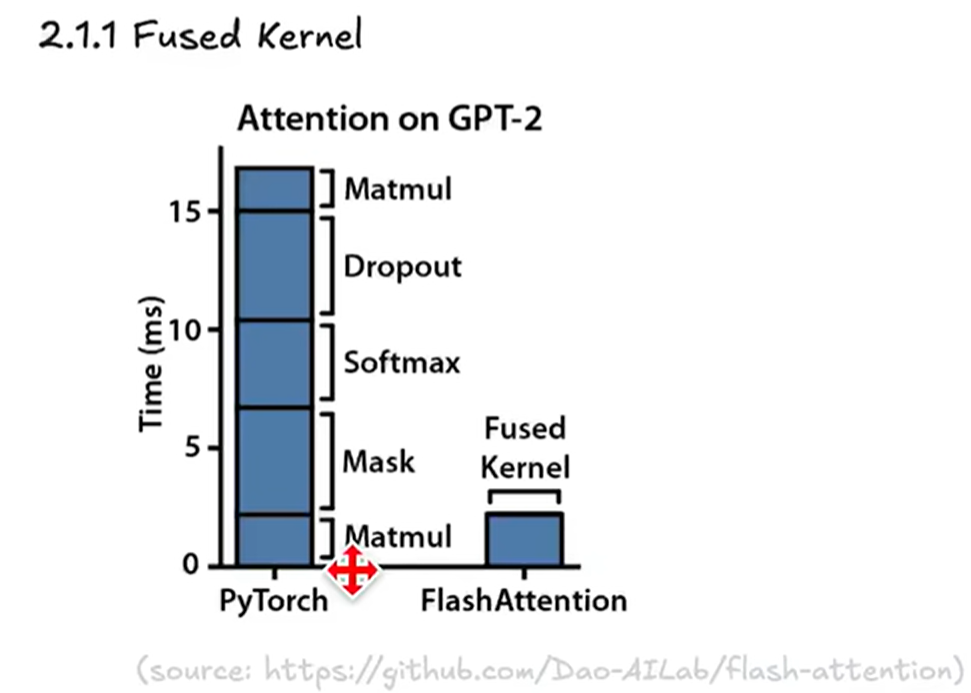
- 减少将attention用一个kernel完成后,速度显著降低
- 从右图也可以看到虽然matmul占现存很多,但是因为是矩阵运算,速度快,反而是dropout、softmax和mask这些地方速度很慢
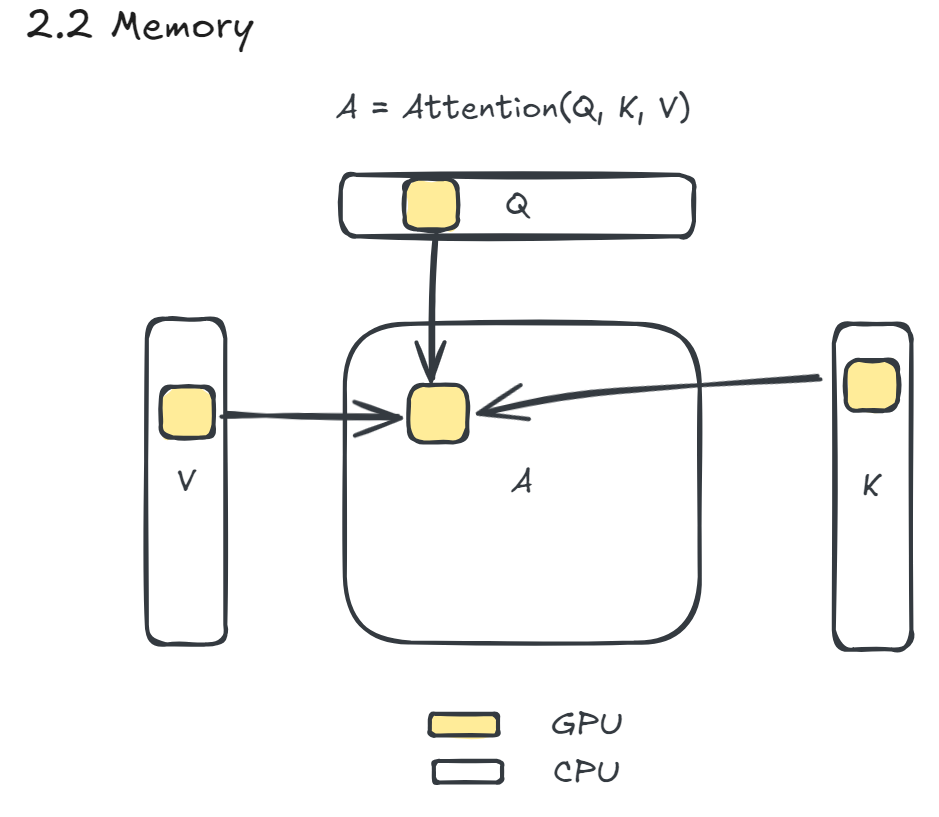
Flash Attention也是不用的时候把东西放到CPU上
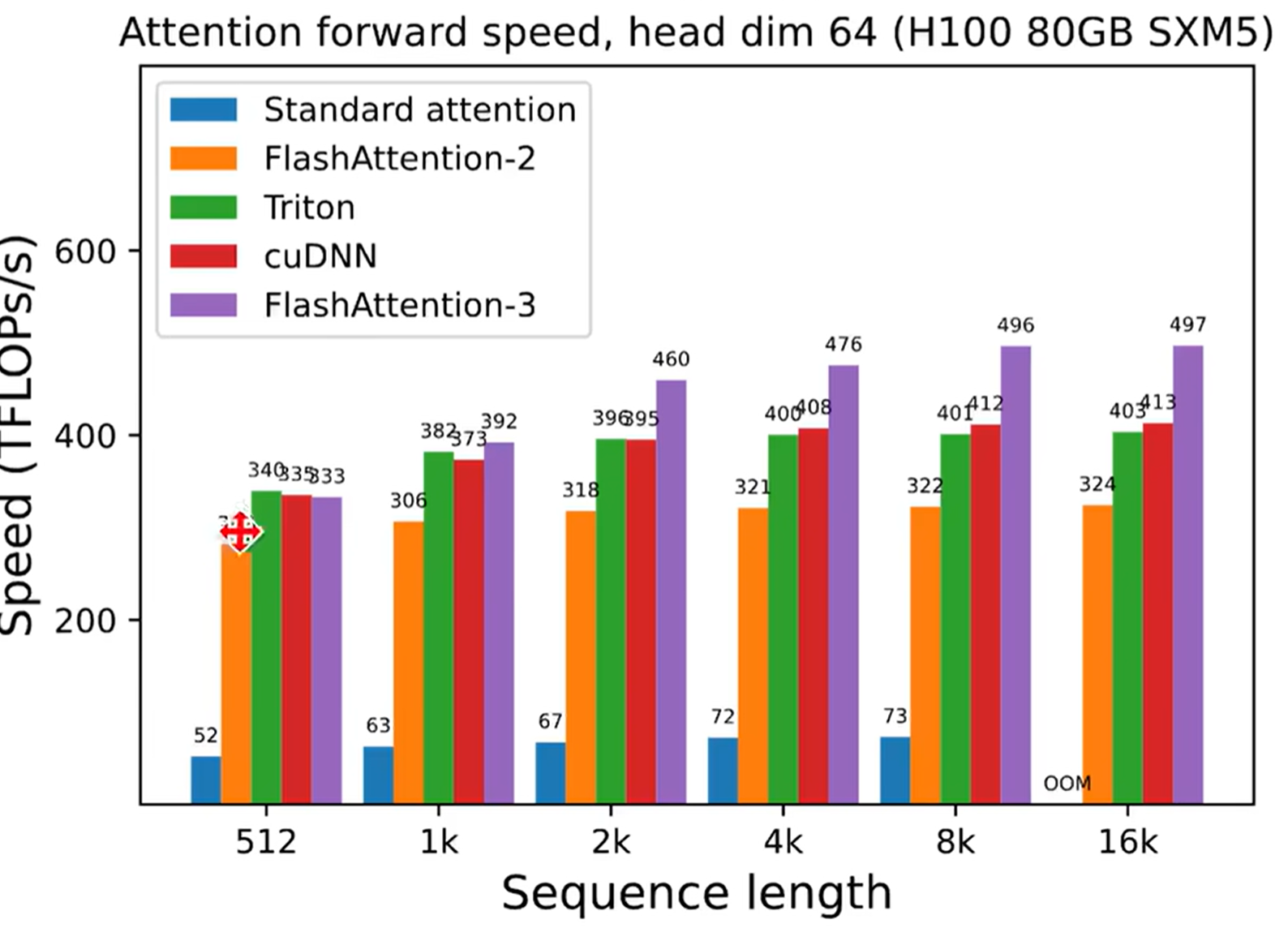
上图越高代表速度越快
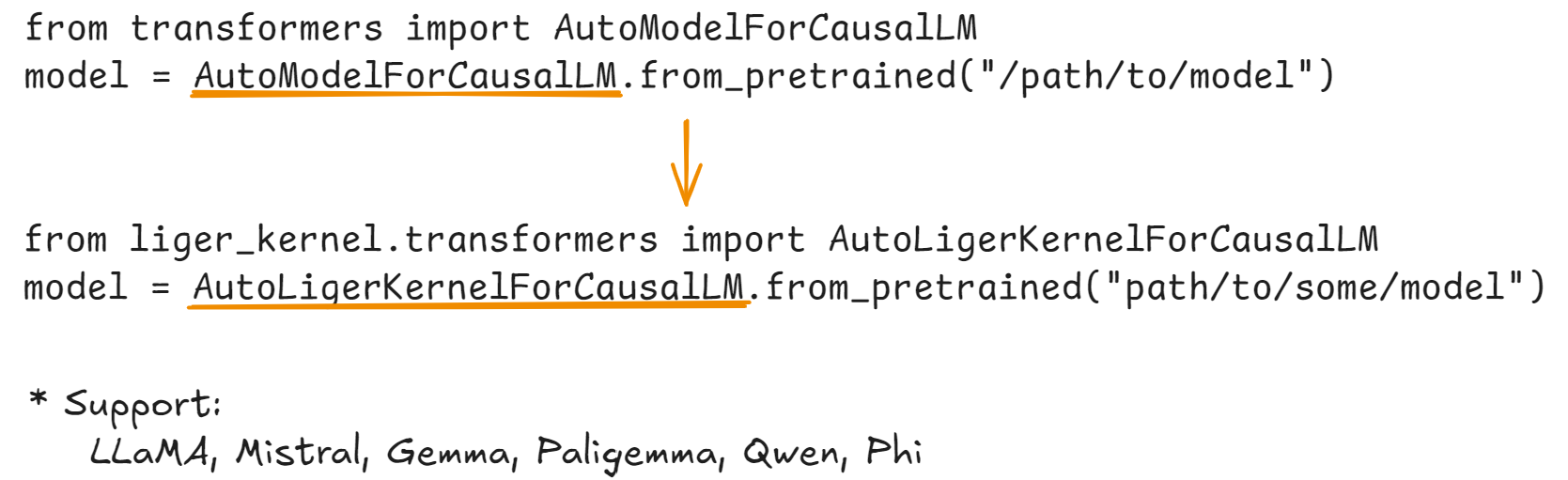
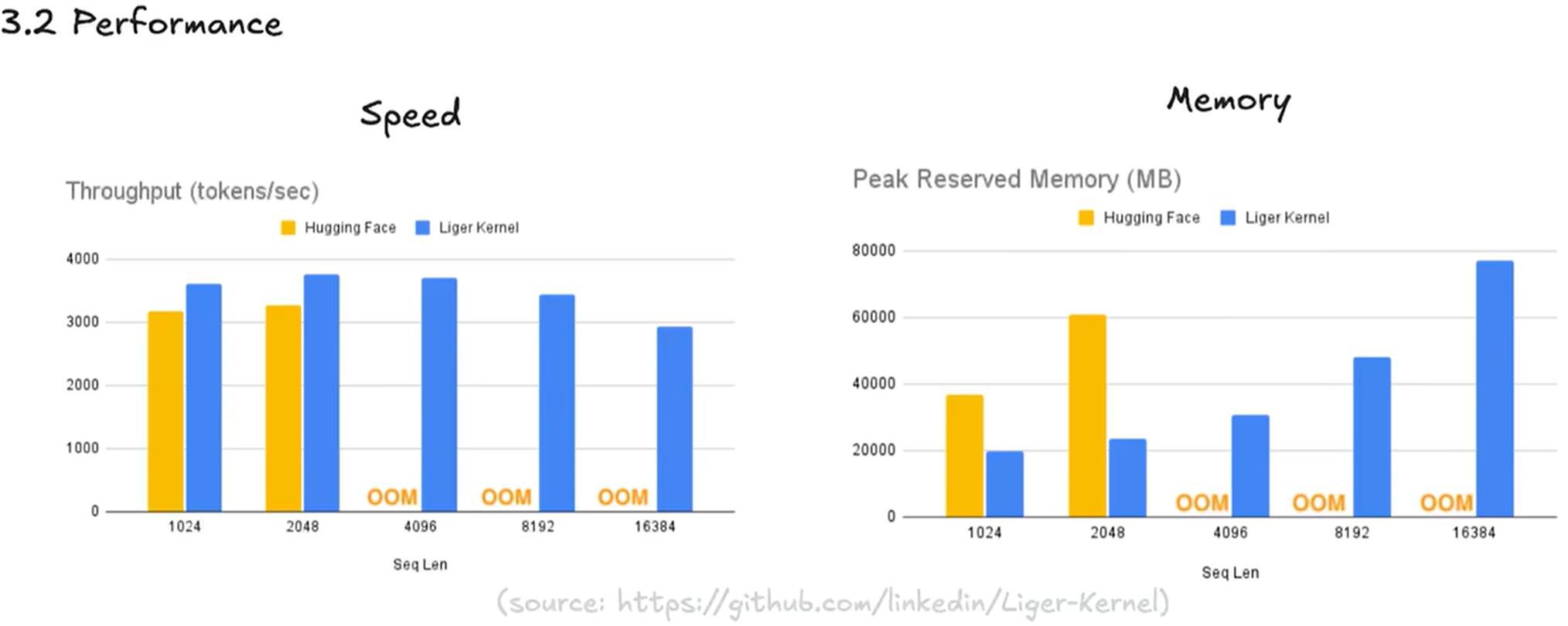
Liger Kernel
Reimplement some core LLM computation with optimized Triton code.
使用也很方便,直接调用相应的函数即可
Part III : Quantization
量化是一种有损压缩(Lossy Compression)技术,将模型中的高精度权重(通常是 float32 或 float16)转换为低精度整数(如 int8、int4)
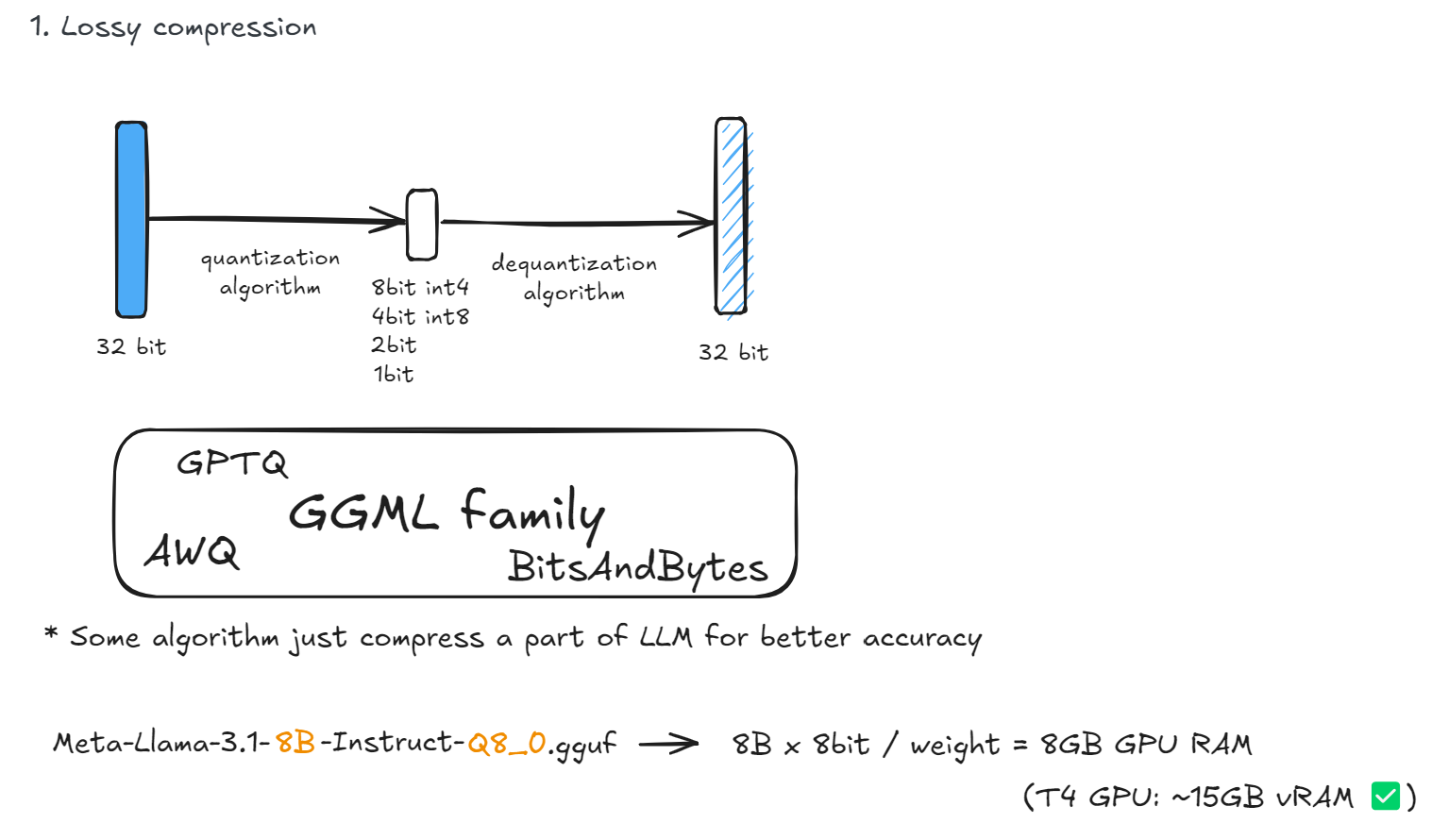
Meta-Llama-3.1-8B-Instruct-Q8_0.gguf:
Q8_0表示 每个权重用 8-bit 整数存储- 模型大小 ≈ 8B × 1 byte = 8 GB