Convolutional Neural Network
卷积神经网络概述
引例——图像边界检测
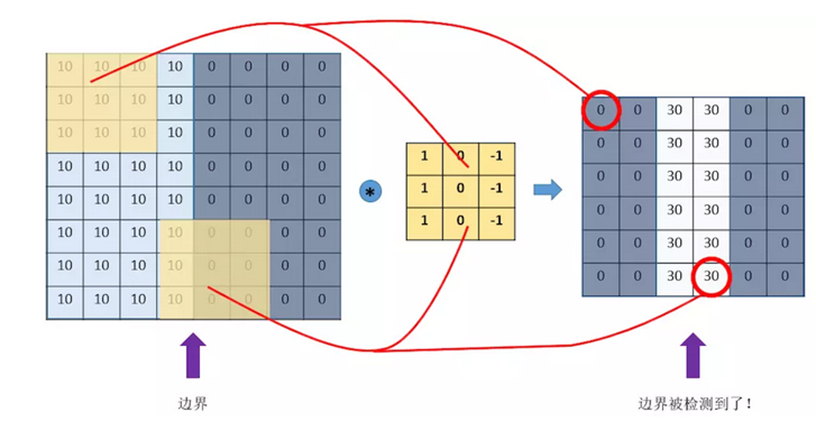
假设我们有这样的一张图片,大小8×8,图的中间两个颜色的分界线就是要检测的边界。怎么检测这个边界呢? 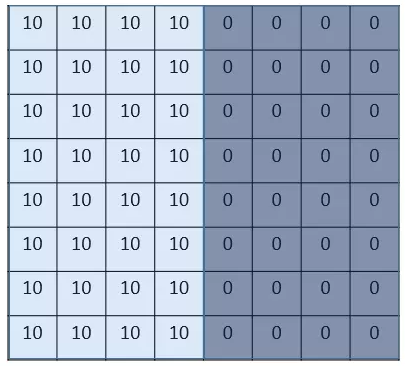
图片中的数字代表该位置的像素值,像素值越大,颜色越亮,所以为了示意,我们把右边小像素的地方画成深色。
设计一个 滤波器(filter,也称为kernel),大小3×3: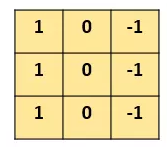
“卷积”过程:用filter,往原图片上覆盖,对应元素相乘,然后求和。计算一个区域之后,就向其他区域挪动,接着计算,直到把原图片的每一个角落都覆盖到了为止。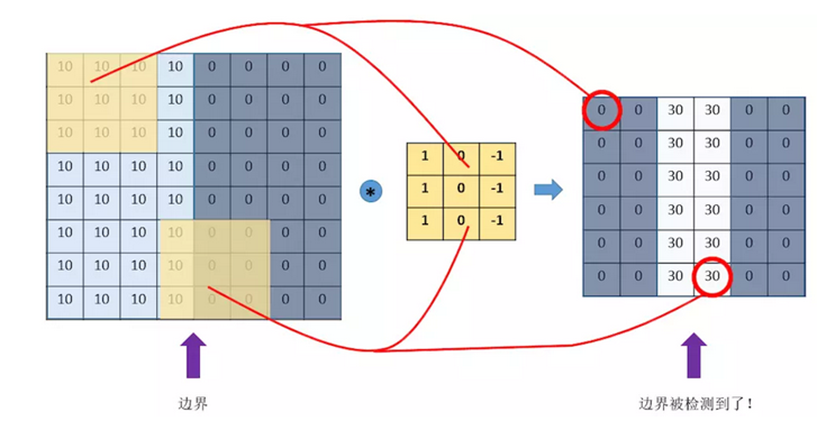
上面的例子是检测竖直边界,我们也可以设计出检测水平边界的,只用把刚刚的filter旋转90°即可。对于其他的特征,理论上只要我们经过精细的设计,总是可以设计出合适的filter的。
卷积神经网络(convolutional neural network,CNN )是一种包含卷积运算的前馈神经网络,它的人工神经元可以响应一部分覆盖范围内的周围单元,对于大型图像处理有出色表现,是深度学习的代表算法之一。
主要就是通过一个个的filter,不断地提取特征,从局部的特征到总体的特征,从而进行图像识别等等功能; 每个filter中的各个数字就是参数,可以通过大量的数据,来让机器自己去“学习”这些参数。这就是CNN的基本原理。
CNN发展历史
- 1960s, Hubel 和 Wiesel通过对 猫视觉皮层细胞 的研究,提出了 感受野 这个概念。
- 1980s, Kunihiko Fukushima 在 感受野 概念的基础之上提出了 神经认知机 (neocognitron )的概念,可以看作是卷积神经网络的第一个实现网络。
- 1990s, Yann LeCun 等人发表论文LeNet,确立了 CNN的现代结构,后来又对其进行完善。
- 2012,更深层次的 AlexNet网络 取得成功,此后卷积神经网络蓬勃发展,被广泛用于各个领域,在很多问题上都取得了当前最好的性能
CNN基本结构
CNN的基本结构由输入层、隐藏层、输出层构成。其中隐藏层又包括卷积层、池化层 、全连接层。
卷积层和池化层一般会取若干个,采用卷积层和池化层交替设置,即一个卷积层连接一个池化层,池化层后再连接一个卷积层,依此类推。由于卷积层中输出特征面的每个神经元与其输入进行局部连接,并通过对应的连接权值与局部输入进行加权求和再加上偏置值,得到该神经元输入值,该过程等同于卷积过程,CNN 也由此而得名。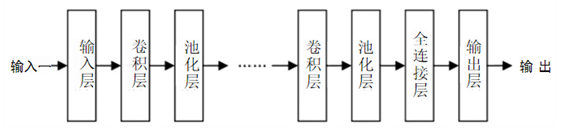
- 卷积层
- 局部特征提取
- 训练中进行参数学习
- 每个卷积核提取特定模式的特征
- 池化层
- 降低数据维度,避免过拟合
- 增强局部感受野
- 提高平移不变性
- 全连接层
- 特征提取到分类的桥梁
- 用于输出结果
会在卷积层和全连接层后增加Dropout层,随机让部分结点停止工作,防止过拟合现象的产生,提高模型的泛化能力。
卷积神经网络与全连接神经网络对比
1. 局部连接
传统的前馈神经网络,前一层的结点 与后一层的结点全部连接起来,这种连接方式称为全连接,如图所示。 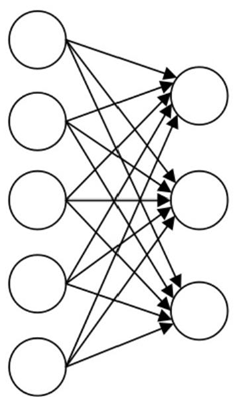
如果前一层有m 个结点,后一层有n个结点,就会有m×n个连接权重,完成一次反向传播更新权重时,要对这些权重进行重新计算,造成了O(m×n)=O(n2) 的计算开销和存储开销。
局部连接的思想是两层之间只有相邻的结点才进行连接,即连接都是“局部”的,如图所示。 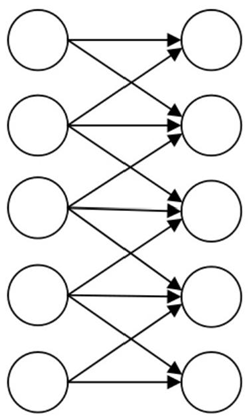
以图像处理为例,图像的某一个局部的像素组合在一起共同呈现一些特征,而图像中距离比较远的像素组合起来则没有实际意义,因此这种局部连 接的方式可以在图像处理问题上有较好的表现。
如果把连接限制在空间中相邻的C个结点,就 可把连接权重降低至C×n, 计算开销和存储开销就 降低至0(C×n)=O(n)。
2. 权重共享
在全连接神经网络中,当计算从输入层经隐藏层到输出层,权重矩阵中的每个元素都只使用 过一次,即每个元素与输入矩阵中的一个元素相乘,之后不会再重复利用。
卷积神经网络是在输入图像的不同位置使用同一个卷积核进行计算。对于每一个卷积核,它的核内参数在计算过程中都是不变的。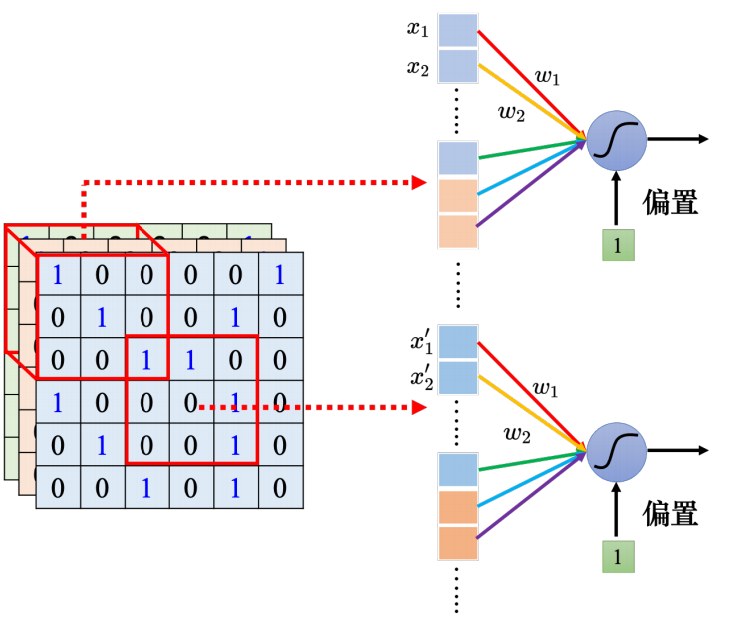 卷积核内部的值就是权重,卷积运算是将卷积核的权重与对应的输入图像矩阵元素按位相乘,最后将结果相加,卷积神经网络的权重参数 量显然比全连接神经网络的参数量减少了很多。参数量减少的同时,也 有效地避免了过拟合现象的产生。
卷积核内部的值就是权重,卷积运算是将卷积核的权重与对应的输入图像矩阵元素按位相乘,最后将结果相加,卷积神经网络的权重参数 量显然比全连接神经网络的参数量减少了很多。参数量减少的同时,也 有效地避免了过拟合现象的产生。
卷积层
为什么使用卷积
SVM分类步骤:
- 人工提取特征,比如说大小,形状,重量,颜色等;
- 根据上述特征,把每一张图片映射到空间中的一个点,空间的维度和特征的数量相等;
- 相同类别的物体具有类似的特征,所以空间中标记为草莓的点肯定是聚在一起的,香蕉和橘子也是同理。
图像分类任务的瓶颈出现在特征选择上
除了橘子橙子问题,我们还有猫狗如何区分,狗品种如何识别等一系列问题。我想对于大部分人来说,狗狗品种的识别是非常有难度的。转了一圈回来,突然发现,图像分类任务的瓶颈竟然出现在特征选择上。(诚然目前有SIFT、HOG、LBP、LDP等自动提取特征的算法,但是效果并不理想,有局限性。)
如果我们用神经网络直接对猫狗进行分类呢?这样不就避开了特征提取这一步了吗?假设输入图片大小为30*30,那么设置900个输入神经元,隐含层设置1000个神经元,输出神经元个数对应需要的输出数量不久好了吗?甚至用SVM也可以这样做,把一张30×30的图看作900维空间中的一个点,代表猫的点和代表狗的点在这个900维的空间中必然是相聚于两个簇,然后我们就又可以使用SVM来划出分界线了。
手写数字辨识的几何空间解释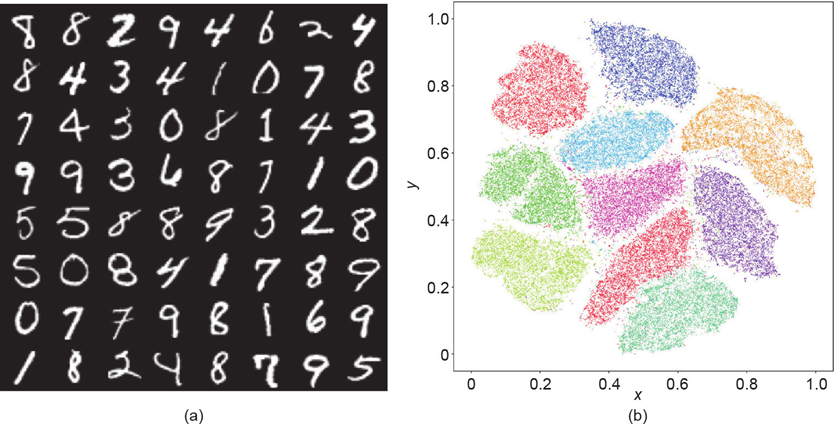
手写字28*28=784,每一张图片在784维空间都是一个点,所有的图片映射到784维空间解释一个点云。每种数字图像都会在784维空间的点会形成一个聚类,同一个数字就会聚在一块。
但是这样计算开销就太大了,对于30×30的图片我们也许可以这样做,对于1000×1000的图片我们这样做的话就需要至少一百万个隐层神经元,这样我们就至少要更新10^12个参数。而SVM的话,则相当于在一百万维的空间中运行了。运算量将会大的难以估计。另外,图片中并不是所有的信息都和是我们需要的。背景对我们的分类毫无价值,然而在这种一股脑全部拿来做输入的情况下,背景也被当成了特征进入了模型当中,准确度自然会有所下降。
总之,如果不人工提取特征,那么计算量会非常大,精确度也无法保证。而人工提取特征的方式又会在某些问题下难以进行,比如狗狗品种分类。
而CNN通过他独有的方式,成功解决了这两个问题。也就是说,CNN是一个可以自动提取特征,而且待训练参数相对不那么多的神经网络,这就是CNN在图像分类任务中的决定性优势。
卷积的两个主要优势在于:稀疏连接(sparse connectivity)和参数共享(parameter sharing)
- 稀疏连接:每一个神经元不需要去感受全局图像,只需要感受局部的图像区域
- 参数共享:卷积层中的卷积核正是充当着共享感受野的角色。一个卷积核提取一个特定的图像特征,想要得到图像的多个特征,只需要使用多个卷积核
卷积运算
卷积层接收到图像后,会对图像进行卷积运算。
卷积运算就是使用一个特征检测器,在图像上进行扫描,不断地检测图像的每一个区域,与特征检测器的模式越相似,它的激活值就越高,从而实现了特征提取功能。在卷积运算中,特征检测器就是卷积核,也称为滤波器。 使用的卷积核大小为3×3矩阵,如下图左侧所示。对输入图像进行卷积操作后的得到的矩阵如图中间所示。同样的,矩阵中的数值代表图像的亮度,数值越大,对应像素的亮度更强。卷积得到的矩阵对应的图像如图右侧所示。由图可见,通过使用这个卷积核,我们很好的得到输入图像中间的垂直边缘这一特征。事实上,卷积神经网络正是通过设置和调整卷积核的参数来获取输入的特征。 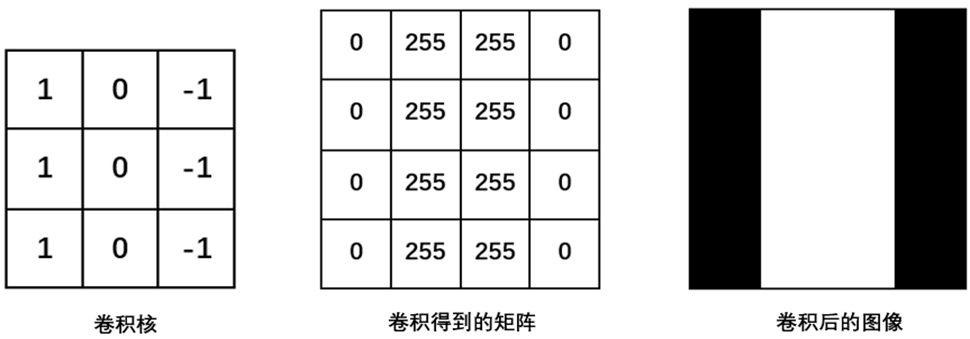 例如,输入图像尺寸为4×4,使用尺寸为3×3的卷积核进行卷积运算,可得到2×2的特征图,如图一所示。
例如,输入图像尺寸为4×4,使用尺寸为3×3的卷积核进行卷积运算,可得到2×2的特征图,如图一所示。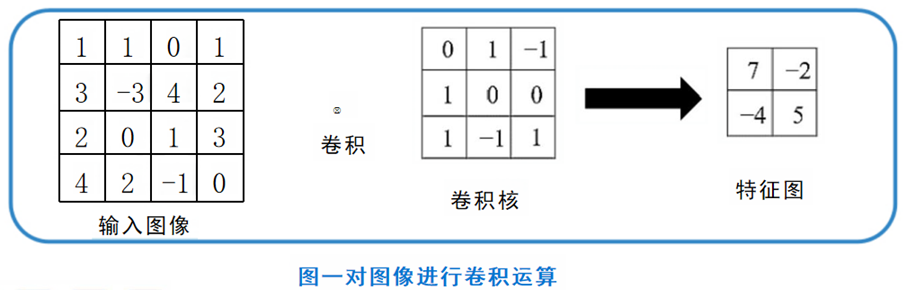
卷积核的尺寸通常设置为3×3 、5×5 、7×7 等。卷积核的权重不需要提前设计,只需要初始化,然后即可在卷积运算中经梯度下降算法和反向传播算法得到优化。
输入图像与卷积核进行卷积运算的步骤如下:
(1)将卷积核置于输入图像的左上角,然后将对应元素相乘求和。
(2)将卷积核向右移动一个步长,重复步骤(1),即可输出同一行的第二个值。
(3)重复步骤(2),每次向右移动一个步长,直到卷积核的右侧边缘到达输入图像的右侧边缘,即完成特征图的一行。
(4)回到输入图像的最左侧且向下移动一个步长,重复步骤(2)和步骤(3)计算特征图的下一行。
(5)重复步骤(4),直到卷积核的下方边缘到达输入图像的下方边缘。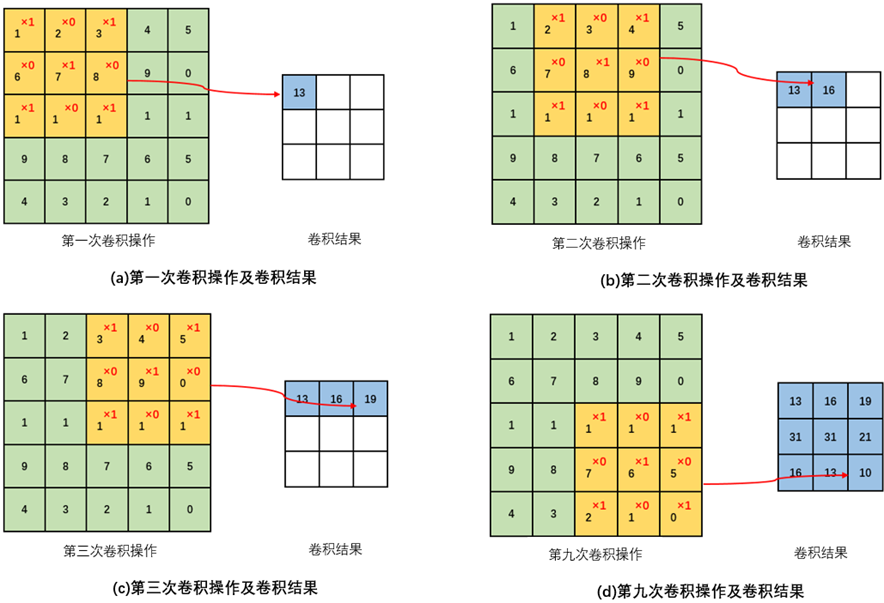
多通道卷积
彩色图像有R,G,B三个通道,这是我们该如何实现卷积呢?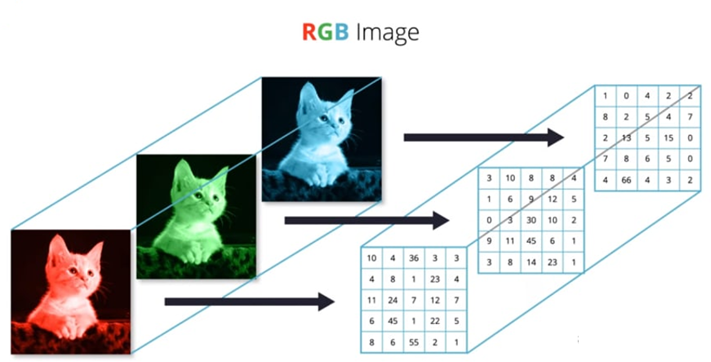
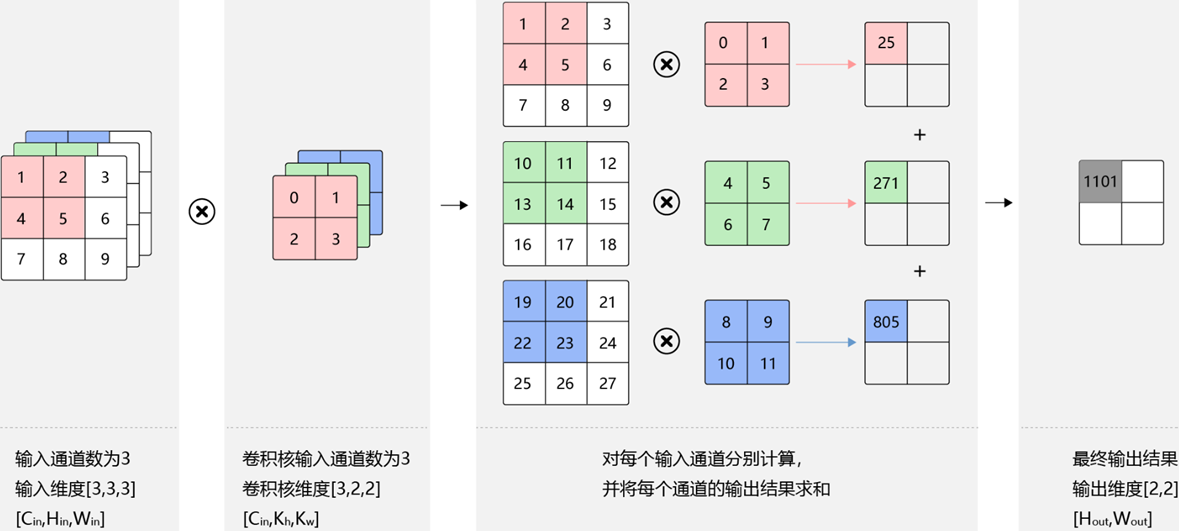
对于输入的图像,我们不仅仅想要得到图像中垂直边缘的特征,同时还想得到更多的特征如水平边缘,边角,弧线等。这个时候应该怎么办呢?答案是增加卷积核的个数。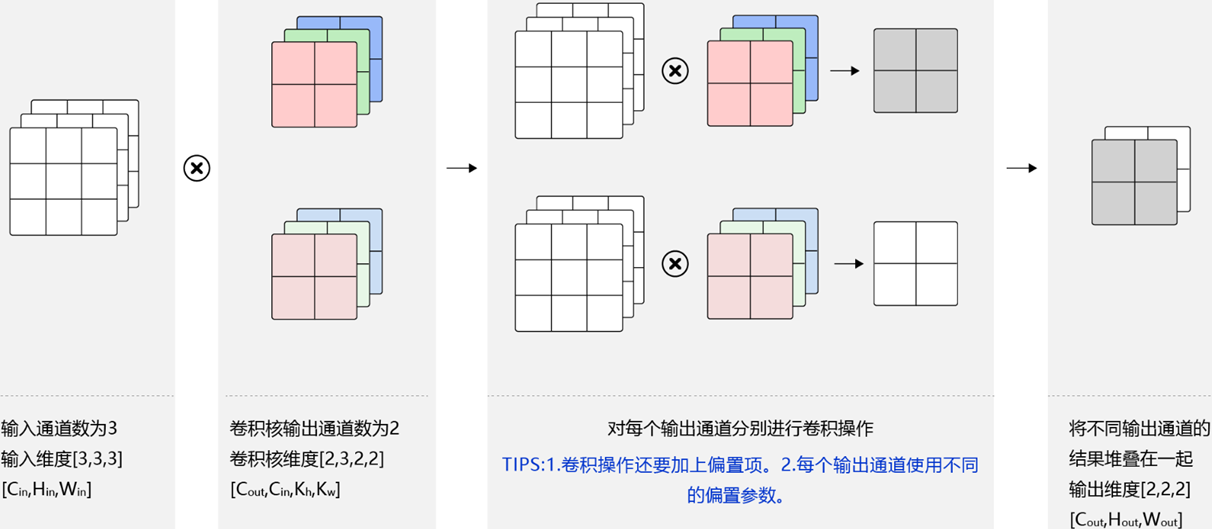
卷积层的卷积核和输入/输出通道数关系如下:
(1)卷积层的输入通道数视输入图像而定,如RGB图的通道数为3,灰度图的通道数为1。
(2)卷积核的通道数和卷积层的输入通道数相同。
(3)卷积层的输出通道数需视卷积核的数量而定,而且卷积层的输出通道数就是下一层卷积层的输入通道数。
卷积计算的思考
- 特征图的尺寸变化
- 图片边缘数据被利用的次数(在卷积核滑动的过程中,图像边缘的像素点参与的卷积计算远少于图像内部的像素点,导致图像边缘的大部分信息丢失)
填充(padding)
为了尽可能多地保留原始输入图像的边缘信息,可在输入图像周围填入固定的数据,称为填充, 一般情况下都填0,故也称为补零操作。
例如,尺寸为4×4的输入图像,可先在其周围加上一圈1个像素的0作为填充,再进行卷积运算 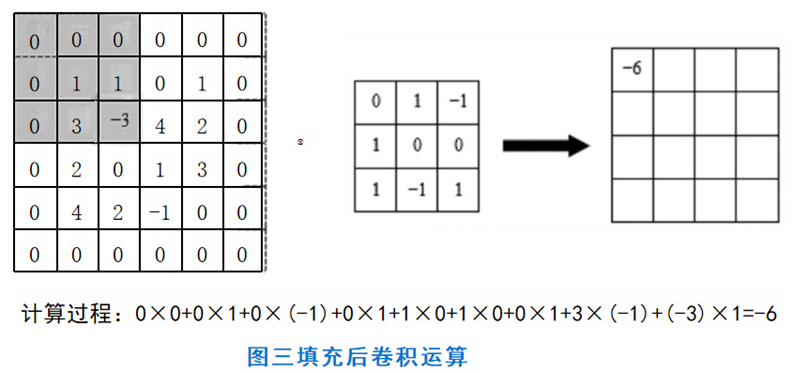
根据填充操作的不同,常用的卷积填充方式可分为VALID卷积和SAME卷积。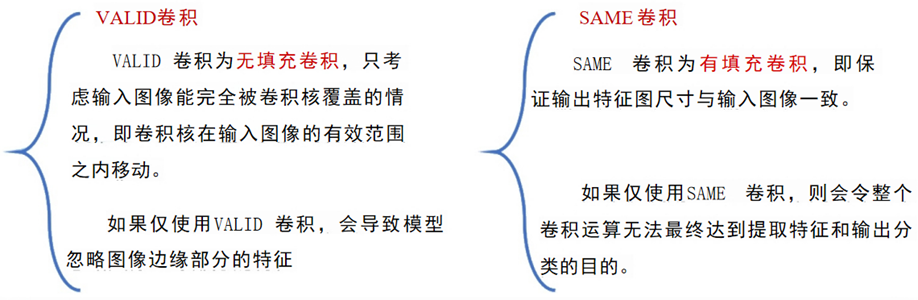
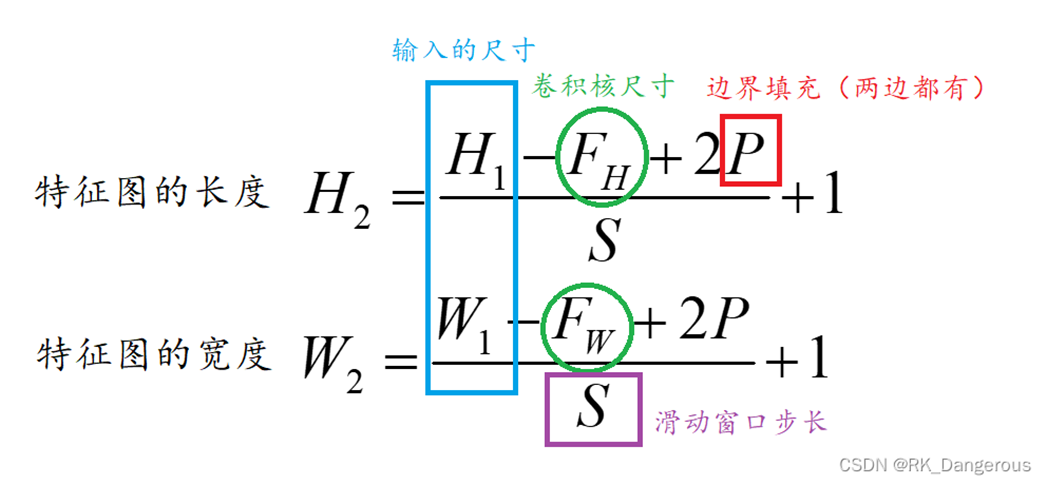
- valid卷积(valid convolutions):如果输入是n×n的图像,用一个f×f的卷积核卷积,那么得到的输出是(n-f+1)×(n-f+1)的特征图。
- same卷积(same convolutions):填充后输出和输入图像的大小是相同的。如果输入是n×n的图像,当你填充p个像素点后,n就变成了n+2p。根据n+2p-f+1=n便可计算p的值。
所以最佳的填充方式是同时使用VALID卷积和SAME卷积,当输入过大时可以采用VALID卷积,想要挖掘更多特征时可以采用SAME卷积。
为什么添加的是0而不是其他数值呢?
因为在卷积时,如果添加了其他数也会在运算的时候对结果产生影响,我们只需要利用被“拯救”的边缘数据,其他部分的0与滤波器中对应的数据相乘还等于0。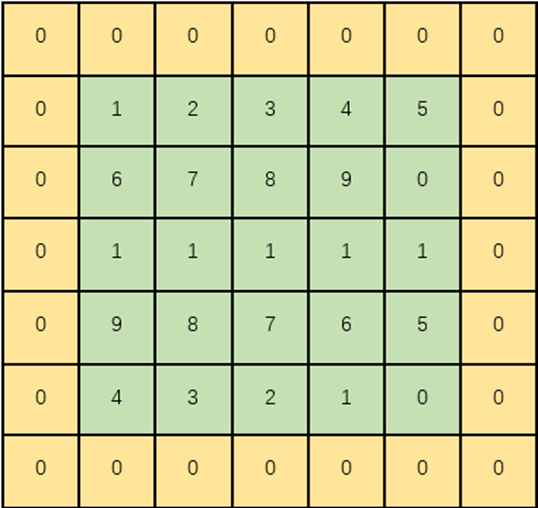
不使用Padding的缺点
- 经过卷积操作后图像会缩小。
- 如果你注意角落边的像素,则此像素点只会被卷积核触碰一次。即只会在第一次卷积操作时被卷积核扫描。这意味着会丢失图像边缘的很多信息。
- 但是对于原始图像中心的像素点,在每次卷积操作时都会被扫描。卷积核的感受野会扫描此位置多次。
步长(stride)
卷积神经网络中的步长指的是在一次卷积计算完成后,卷积核在输入图上移动的距离。假设输入是5×5的图像,卷积核大小为3×3,使用valid卷积,步长为2,那么卷积的结果如下图所示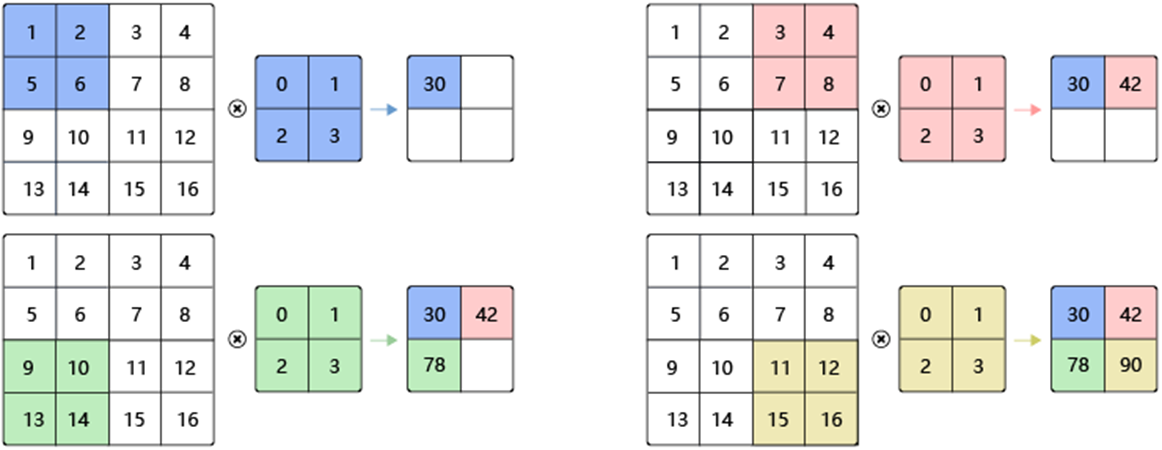
激活函数
在使用卷积核对输入进行卷积运算得到特征图之后,往往需要使用激活函数对特征图进行激活,卷积神经网络激活函数首选为ReLU。
ReLU激活函数的优势:
- 反向传播时,可以避免梯度消失;
- Relu会将一部分神经元的输出置为0,这样就造成了网络的稀疏性,并且减少了参数的相互依存关系,缓解了过拟合问题的发生;
- 相对于sigmoid激活函数,tanh激活函数,求导简单。
卷积核
池化层
池化层紧跟在卷积层之后,同样由多个特征面组成,它的每一个特征面唯一对应于其上一层的一个特征面,不会改变特征面的个数。卷积层是池化层的输入层,卷积层的一个特征面与池化层中的一个特征面唯一对应。池化层旨在通过降低特征面的分辨率来获得具有空间不变性的特征 。池化层起到二次提取特征的作用,它的每个神经元对局部接受域进行池化操作。
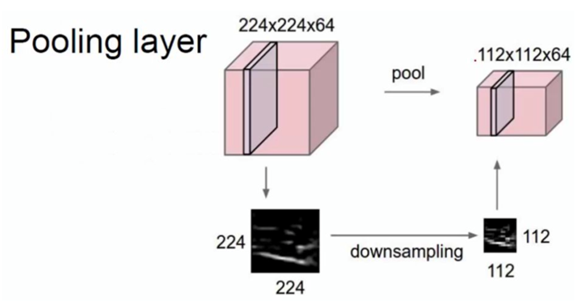 上图显示,池化就是对特征图进行特征压缩,池化层也被称为下采样层。
上图显示,池化就是对特征图进行特征压缩,池化层也被称为下采样层。
作用
- 减少参数数量,提高计算效率
- 提高局部平移不变性,大大提高了图像分类的准确性
- 降低了数据维度,有效地避免了过拟合
- 增强网络对输入图像中的小变形、扭曲、平移的鲁棒性
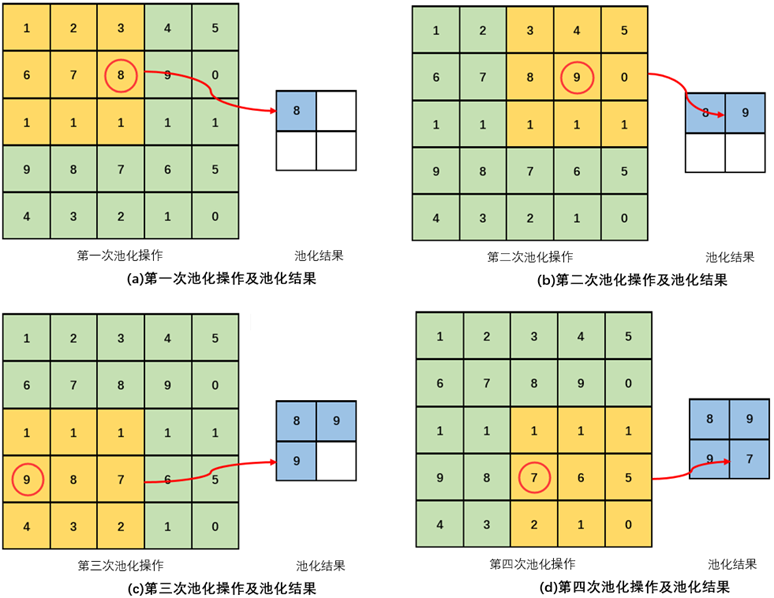
池化方法
- 最大池化(max pooling):取局部接受域中值最大的点;
- 平均值池化(average pooling):对局部接受域中的所有值求均值。 使用时仅需要指定池化方法的类型(max pooling或average pooling等)、池化的核大小(kernel size)和池化的步长(stride)等超参数。
池化层和卷积层不同
池化层没有要学习的参数,池化只是从目标区域中取最大值或者平均值。经过池化运算,输入数据和输出数据的通道数也不会发生变化。
特征图会因为池化运算而压缩变小,可以使用调整步长和填充补零的方法,来达到 池化运算后的特征图不会缩得太小的目的。
Pytorch中常用的池化层 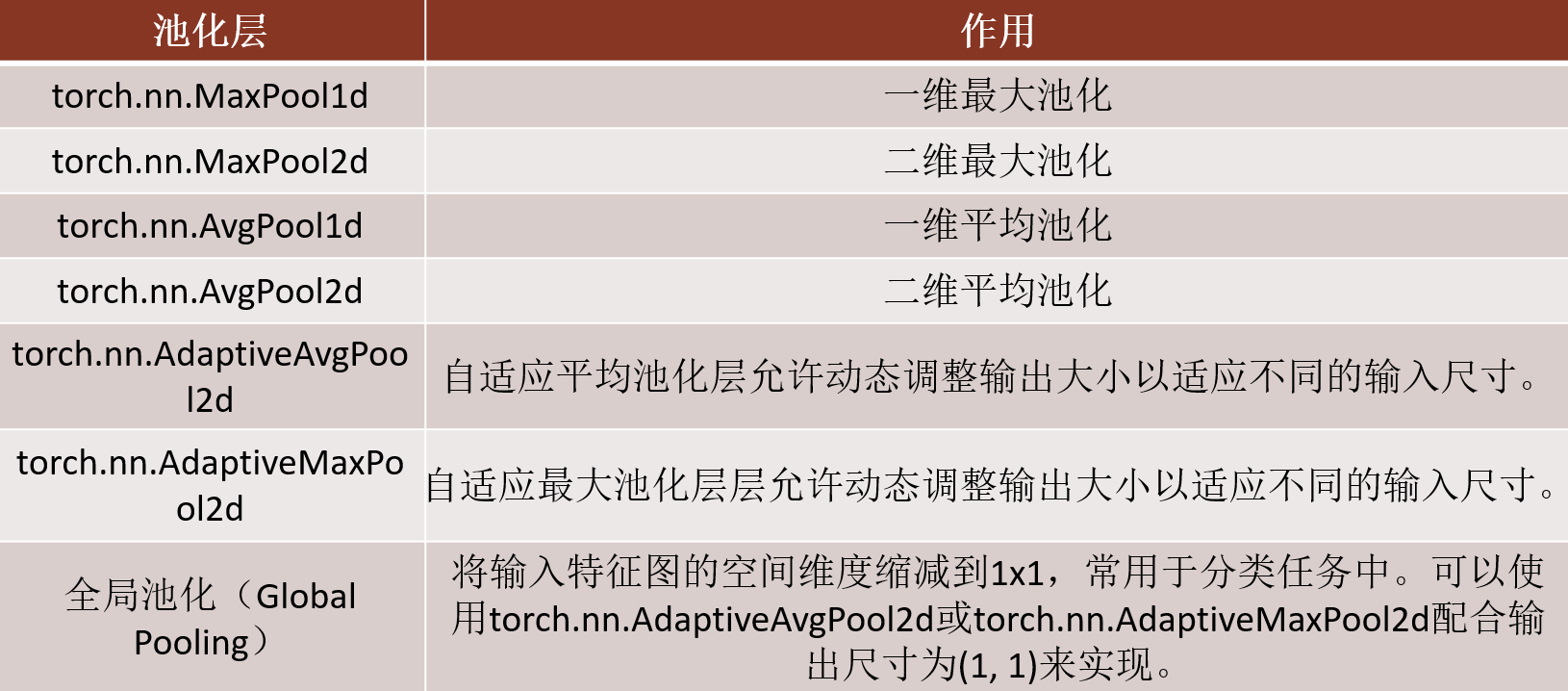
全连接层
CNN应用案例
将AlexNet、VGG和NiN的模型参数大小与GoogLeNet进行比较。后两个网络架构是如何显著减少模型参数大小的?
模型参数规模对比
网络架构 参数量(约) 特点 AlexNet 60 million 全连接层占90%以上参数 VGG16 138 million 深层小卷积核,全连接层庞大 NiN 1-3 million 全局平均池化替代全连接层 GoogLeNet 5-7 million Inception模块 + 1x1卷积降维
- NiN和GoogLeNet减少参数的核心方法
1. NiN(Network in Network)
全局平均池化(Global Average Pooling):
直接对最后一个卷积层的每个通道取全局平均值,生成一个与类别数相同的向量(如1000类)。避免了全连接层,参数减少90%以上(例如,AlexNet的FC层有约4000万参数,而NiN此部分参数几乎为0)。MLP卷积层(1x1卷积):
用多层1x1卷积替代传统卷积层,增强非线性能力的同时减少参数。例如:- 传统3x3卷积:输入256通道→输出256通道,参数为
。 - 1x1卷积:参数仅为
,减少近9倍。
- 传统3x3卷积:输入256通道→输出256通道,参数为
2. GoogLeNet(Inception v1)
Inception模块的1x1卷积降维:
在3x3和5x5卷积前插入1x1卷积,减少输入通道数。例如:- 输入256通道 → 1x1卷积降维到64通道 → 3x3卷积输出128通道。
- 参数:
。 - 若不用1x1降维,参数为
,减少约70%。
无全连接层,全局平均池化:
与NiN类似,GoogLeNet也使用全局平均池化代替全连接层,进一步压缩参数。并行多尺度卷积(Inception结构):
通过并行不同尺寸的卷积核(如1x1、3x3、5x5)提取多尺度特征,避免堆叠单一卷积导致的参数膨胀。
总结
NiN:通过1x1卷积和全局池化,直接消除全连接层,参数降至百万级。
GoogLeNet:利用Inception模块中的1x1降维和全局池化,参数控制在百万级,同时保持高性能。
对比VGG/AlexNet:两者仍依赖庞大的全连接层和未优化的卷积结构,导致参数规模显著更大。