TransIFC Invariant Cues-Aware Feature Concentration Learning for Efficient Fine-Grained Bird Image Classification
| 文章类型 | 期刊论文(IEEE Transactions on Multimedia) |
|---|---|
| Authors | Hai Liu (Senior Member, IEEE), Cheng Zhang, Yongjian Deng, Bochen Xie, Tingting Liu (Member, IEEE), You-Fu Li (Fellow, IEEE) |
| 作者单位 | Central China Normal University (Hai Liu, Cheng Zhang) Beijing University of Technology (Yongjian Deng)City University of Hong Kong (Bochen Xie, You-Fu Li)Hubei University (Tingting Liu) |
| Journal | IEEE Transactions on Multimedia (TMM) |
| IF | |
| Year | 2023.1 |
| Citations | 163 |
| DOI | 10.1109/TMM.2023.3238548 |
| 源码 | |
| Keywords | Deep learning, feature extraction, image classification, invariant cues, transformer |
Intro
研究背景与意义
- 细粒度鸟类图像分类 (Fine-grained bird image classification, FBIC) 是计算机视觉的基础问题。
- 目标: 为鸟类研究者提供高精度的鸟类图像分类预测。
重要性:
- 全球近半数鸟类物种数量下降,保护濒危鸟类至关重要。
- FBIC有助于自动监测、数据分析和物种保护。
挑战: 类内差异大,类间差异小。
FBIC面临的挑战
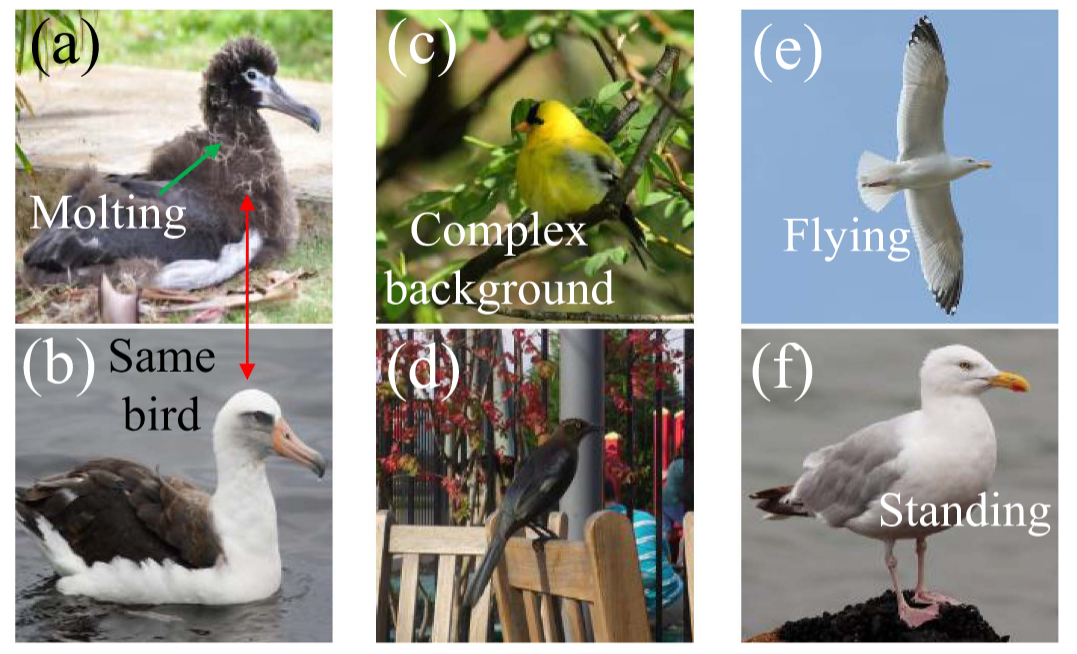
鸟类换羽 (Molting):季节变化导致外观显著不同 (图1a, b),同一鸟类在换羽期和换羽后识别困难。
复杂背景 (Complex Background):自然环境或现代场景中背景复杂 (图1c, d),树枝、树叶等遮挡目标,难以定位和识别。
任意姿态 (Arbitrary Posture):鸟类姿态多样 (站立、飞行等) (图1e, f),不同视角下的特征变化大,核心特征不易捕捉。
个人理解:对于换羽毛和不同姿态这两种情况,从全局整体特征去识别鸟类必然会不精确,唯一解法似乎只能是找到最关键的特征(整个鸟生都不会改变的,像鸟眼睛、鸟喙、鸟脚丫)。
但是其实感觉大多数鸟的眼睛都长得差不多呢?两个黑豆豆。大概是能够捕捉到更多关键信息,相对于传统的方法能够再更多的识别到一些细致的信息。
所以对于问题首先要着重思考数据对象的特征,而不是脱离数据特征去想方法。
观察与动机:不变线索与细微差异
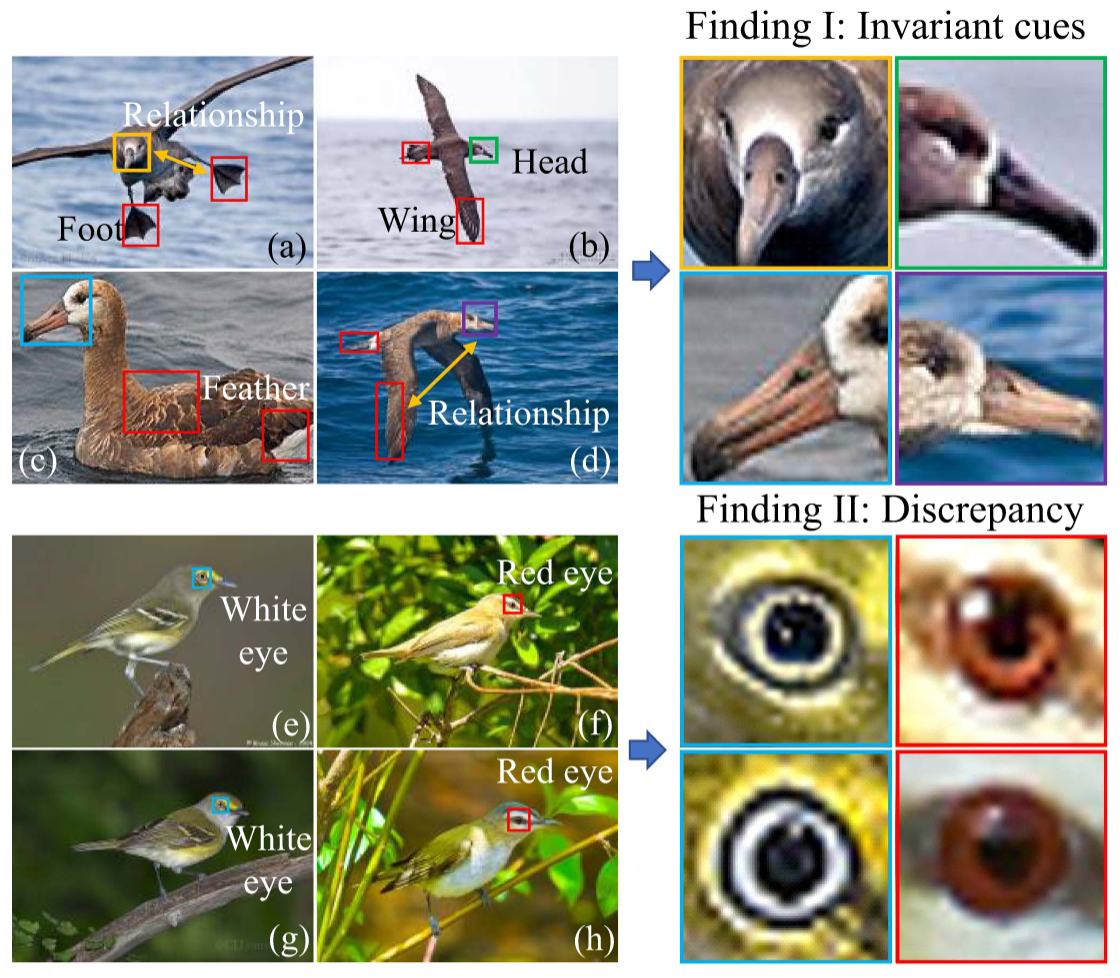
Finding I: 特定鸟类的不变线索--->咋判断是不变特征嘞
- 一种鸟的不同姿态会有很对中不同的特征,如果这些特征都考虑的话会对分类结果造成干扰
- 不同姿态下,鸟类存在核心不变特征(如头部与翅膀、喙的关系)。--->长距离语义关系,加上位置编码。
这里应该对应后面的FFA模块,只保留前K个关键特征。
(25.7.6)这个不变线索感觉怪怪的,不变线索感觉是相对于多张同一类别的图片进行分析,但是实际操作下来还是只是一张图片进行分析。也不对,每学习一个图片对应的参数会修改,如果同一类别都有这个特征,这个特征就会强化。
Finding II: 不同鸟类的细微差异
- 某些鸟类外观相似,但关键特征(如眼睛颜色)存在细微差别。
- 忽略这些微小但决定性的特征会导致误判。
核心动机:设计一种能有效识别不变线索和细微差异的方法,以提高FBIC性能。
我一开始感觉这两个发现好像讲的是一个东西,就是都关注关键部位,只不过分别从类内和类间换了个讲法,但是仔细想想发现并不是。
- 不变线索:应该是相对于经常变化的线索、不重要的线索,关键思路应该是如何在一堆特征中找到能够不变的特征。经过Transformer处理后,虽然得到了很多特征,但有些特征可能只是背景的一部分,或者是一些干扰性的细 节,对分类没啥帮助,反而可能误导模型。
- 细微差异:重点落脚在于如何关注细粒度的信息,更加细化的特征。
所以两个东西它上升来看像是一个意思,找到最核心关键的部位,但是思考的方向、实现却是不同的。
贡献
核心思想: 利用观察到的不变线索和细微差异进行高效细粒度分类。
主要贡献:
- 提出TransIFC模型,首次揭示并利用鸟类图像中的不变线索和长距离语义关系。
- 设计HSFA (层次化阶段特征聚合) 和 FFA (特征中特征抽象) 两个新模块。
- 在CUB-200-2011和NABirds数据集上取得SOTA性能。
tranIFC
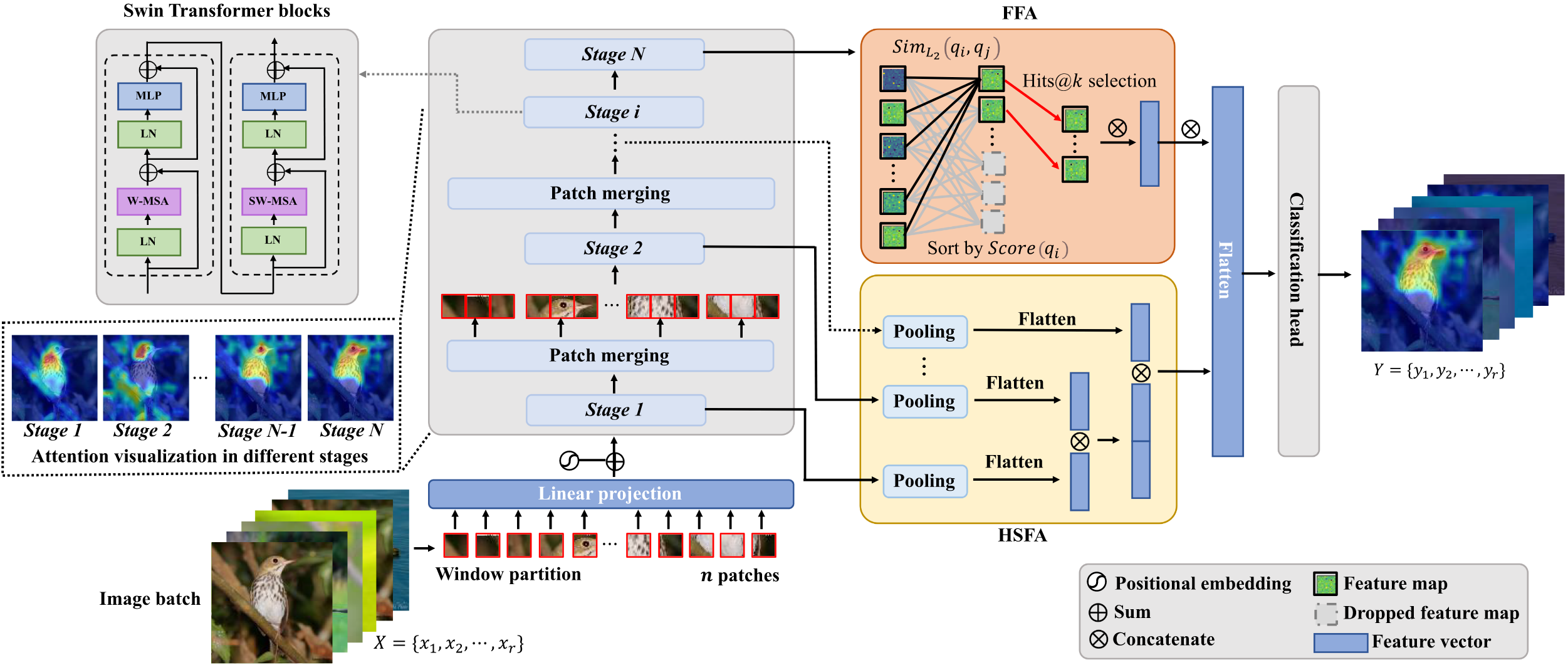
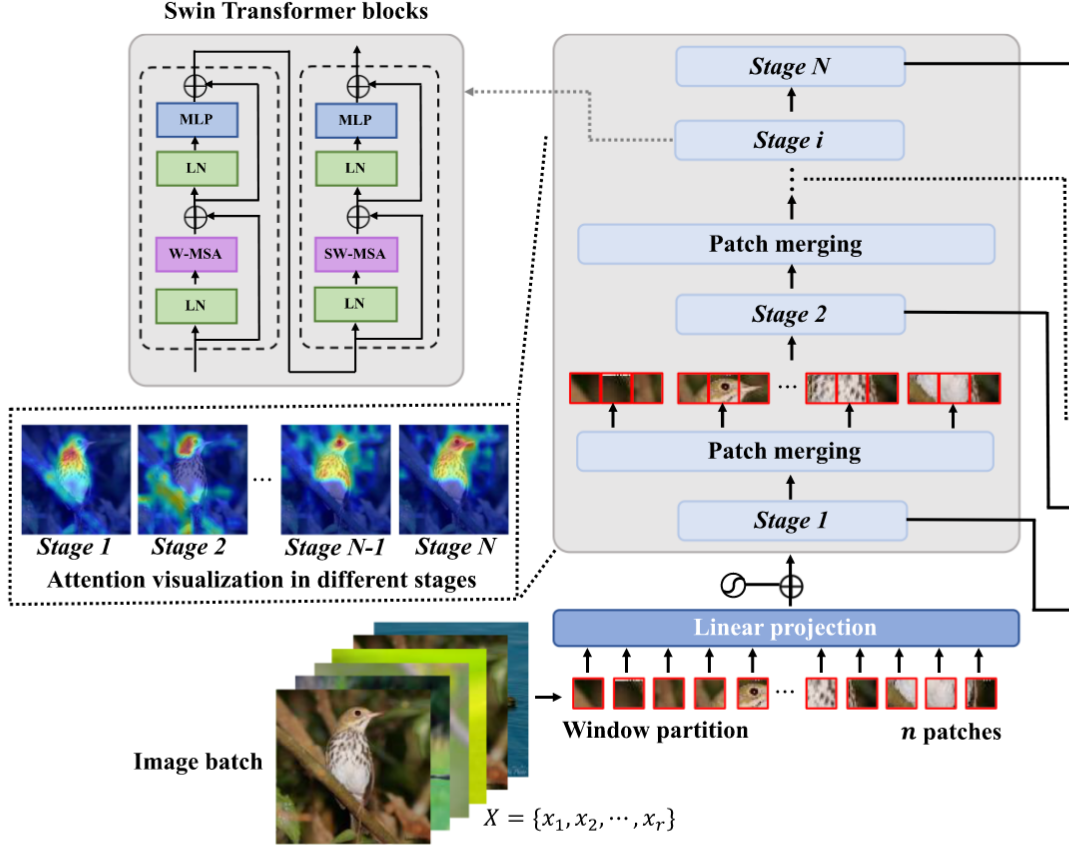
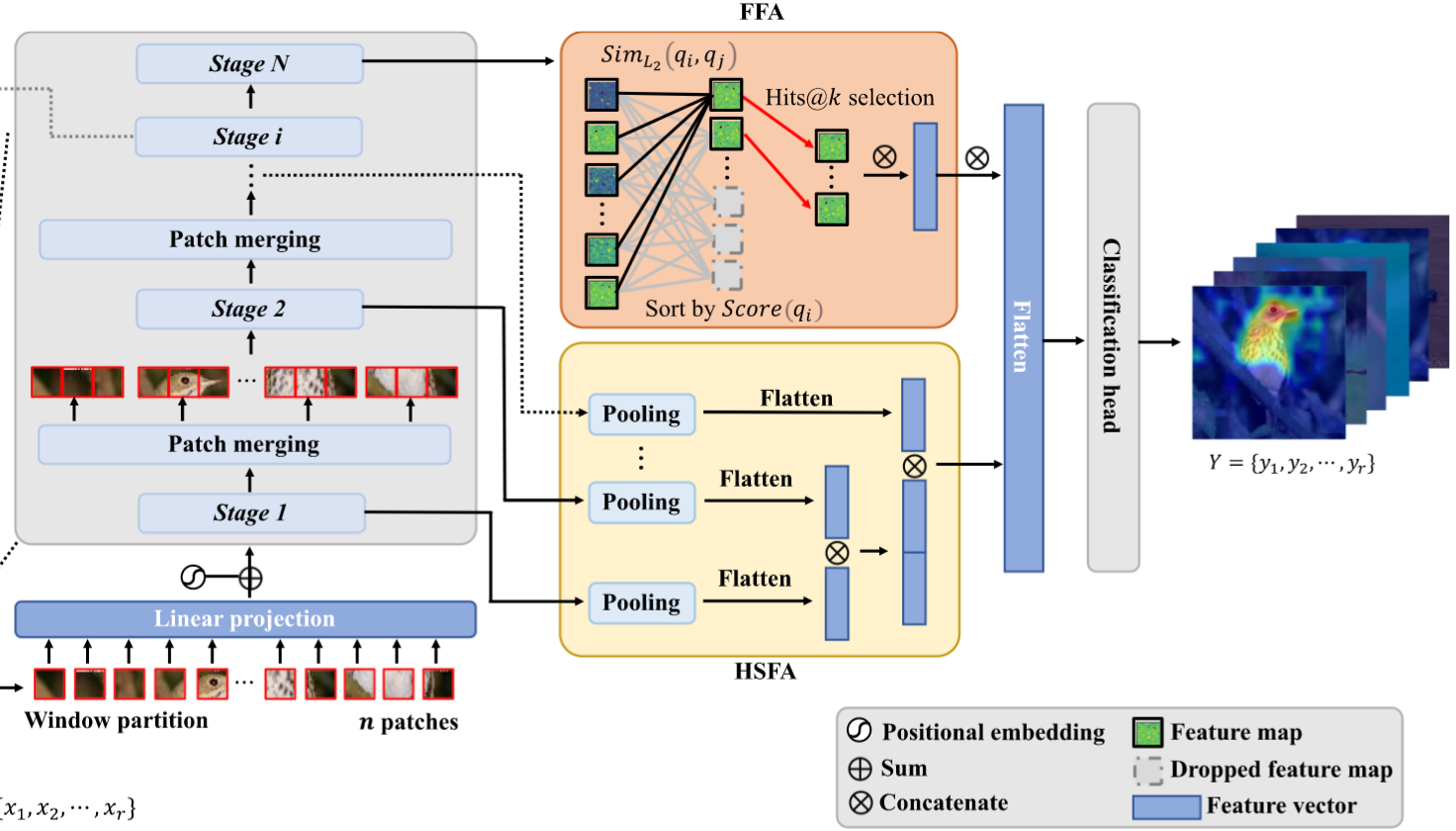
模型架构:
- 特征提取主干: Swin Transformer (处理长距离语义依赖)--->eyes and breast, shifted windowing scheme。
- HSFA模块: 聚合多尺度信息。
- FFA模块: 提取不变核心特征。
- 分类头: 最终预测。
Feature Map Generation
Phase I: 切割图像为块 (Patches)
输入图像
被分割成 个非重叠块 计算公式:
每个块
展平为一维向量,并通过线性投影 得到 -维向量 :
Phase II: 位置嵌入 (Positional Embedding)
Transformer对输入序列顺序不敏感,需添加位置信息
将块向量
与位置嵌入 相加得到 : 嵌入类型可选:2D sine, learnable, relative。
Phase III: 通过Transformer块 (DPG策略)
使用 M 个 Swin Transformer 块处理
。每个块包含 W-MSA (窗口内多头自注意力) 和 SW-MSA (移位窗口多头自注意力) 以及 MLP (多层感知机)。 通过 N 个stages的 Patch Merging 层分层处理。
最后一层输出经平均池化后与低层特征融合。
FFA Module
经过Transformer处理后,虽然得到了很多特征,但有些特征可能只是背景的一部分,或者是一些干扰性的细节,对分类没啥帮助,反而可能误导模型。FFA 的功能就是去掉这些干扰特征,提取出更具有区分度的特征。---> 不变线索
首先,FFA模块先计算当前阶段所有特征向量之间的相似度。它会给每个特征向量打一个分数discrimination score(该特征向量和其他所有特征向量的相似度总和的倒数),如果一个特征向量跟其他所有特征都长得差不多,那它的得分就低,说明它比较普通,没啥特色;反之,如果它跟其他特征都差别很大,那它的得分就高,说明它很独特,很有价值。最后,FFA会选出得分最高的前k个特征向量,扔掉剩下的。这样就只保留了那些最能代表当前图像内容、最具区分性的核心特征了。
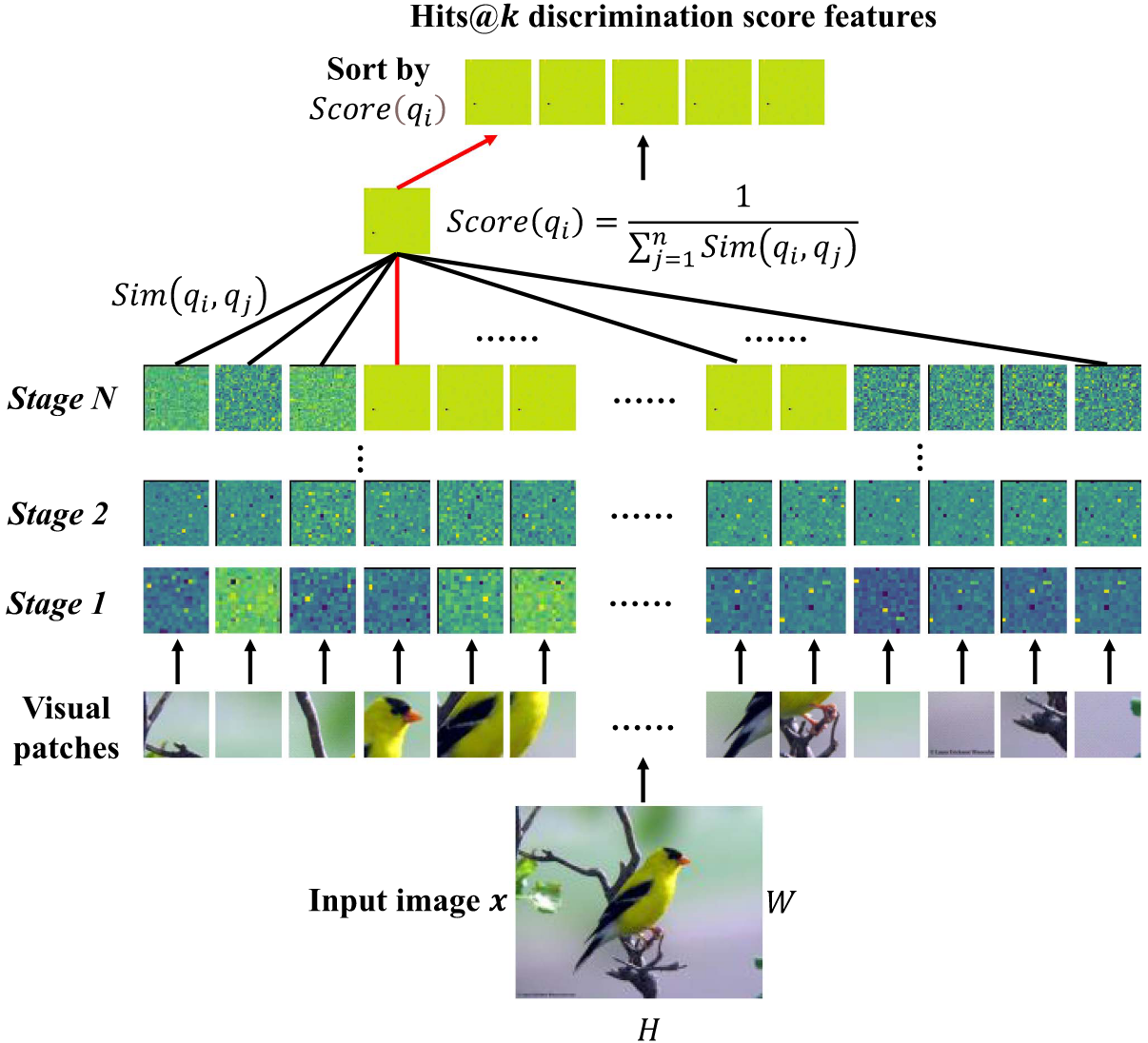
1. 计算块向量间的相似度
输入:同一阶段中的
方法一:余弦相似度(Cosine Similarity)
方法二:逆L2距离(Inversed L2 Distance)
2. 计算区分度得分(Discrimination Score)
定义:向量
3. 选择得分最高的 k 个 (Hits@k) 块向量作为下一阶段的输入,其余丢弃
HSFA Module
直接将低层(包含更多细节)和高层(包含更多语义)的信息融合,帮助模型学习更精细的表示。
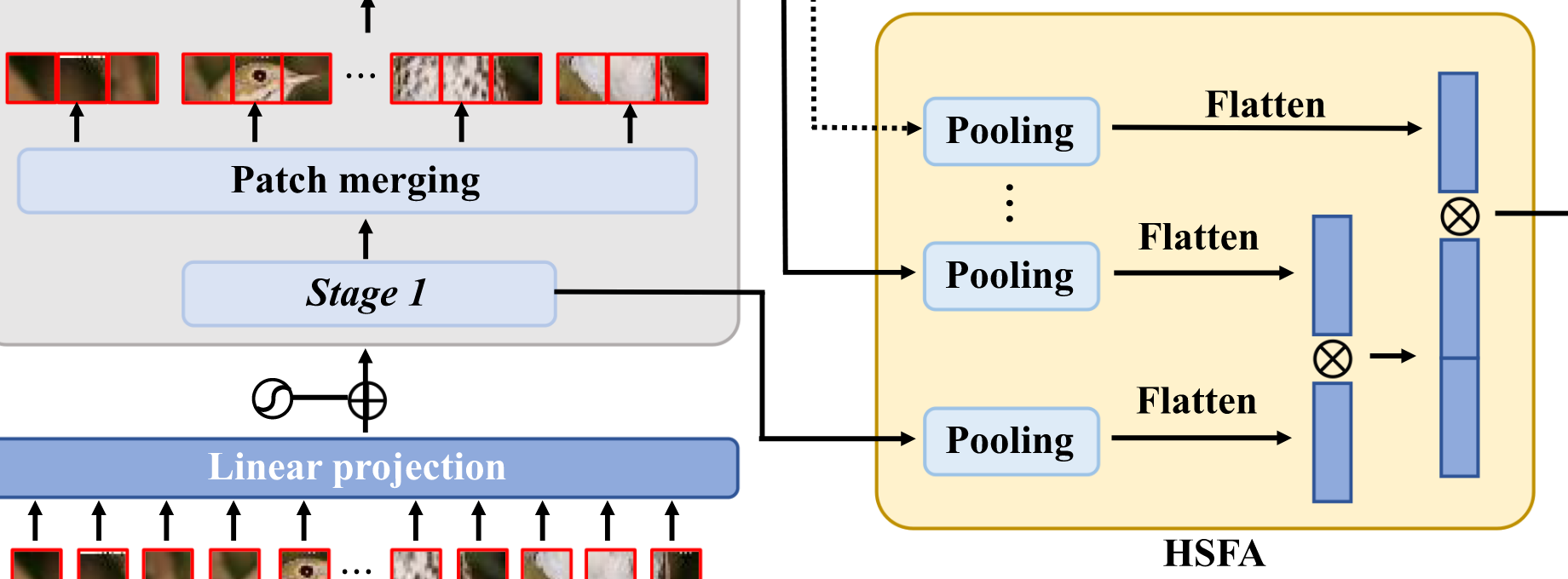
1. 特征图降维处理
操作:对每个阶段
表示最大池化操作 - 输出降维后的特征图
2 特征聚合
操作:展平并拼接所有阶段的特征图
表示Flatten操作 为拼接操作 - 输出聚合特征向量
3. 分类预测
操作:将聚合特征输入分类头(两层全连接 + GELU激活)
为可学习权重矩阵 为偏置项 - 输出预测结果
MAP-Based FBIC Model
最大后验估计(Maximum A Posteriori Estimation, MAP)为模型的参数训练引入了一种贝叶斯推断的方式,既考虑数据的拟合度,也考虑参数的先验约束,从而增强模型的泛化能力,减少过拟合风险。
MAP
目标是找到使得后验概率
根据贝叶斯公式:
因为分母
再取对数方便优化:
结合数据
似然项(拟合数据) 假设模型预测值
和真实标签 的误差符合高斯分布: ⇒ 损失项为:
先验项(限制参数大小) 假设参数符合零均值的高斯分布,即:
⇒ 损失项为:
总目标函数(MAP优化):
- 第一项是回归损失;
- 第二项是正则化项(相当于L2正则);
- η 控制正则化强度。
优化方法
使用的是 AdamW 优化器,它是对 Adam 的改进版本,能够更好地与权重衰减项(即正则项)配合,从而更稳健地训练深层神经网络。
Experiment Results and Discussion
实验设置
数据集
- CUB-200-2011: 200类,11788张图片,鸟类小巧,特征细微。
- NABirds: 700类(含性别、年龄),48000张图片,类别多,背景复杂。
- 扩展实验: Stanford Cars (验证方法泛化性)。
对比方法
- 传统方法: RA-CNN, MaxEnt, StackedLSTM, FixSENet-154
- CNN-based: Cross-X, PMG-V2, API-Net
- Transformer-based: ViT, Swin-B
- This paper: TransIFC(只在最后一阶段使用FFA), TransIFC+ (将每一层HSFA中的max-pooling改为FFA,既能降维又能集中重要特征)
评估指标
1. 准确率 (Accuracy)
模型预测正确的样本占总样本的比例
:第 个样本的真实标签 :第 个样本的预测标签 :指示函数(预测正确时为1,否则为0) :总样本数
2. 混淆矩阵 (Confusion Matrix)
分析模型在不同类别间的错误分布
参数设置
- 输入尺寸: 448x448 (公平比较), 224x224 (消融研究)。
- Batch Size: 8。
- 优化器: AdamW, Weight Decay: 0.05。
- 学习率: 0.0001。
结果
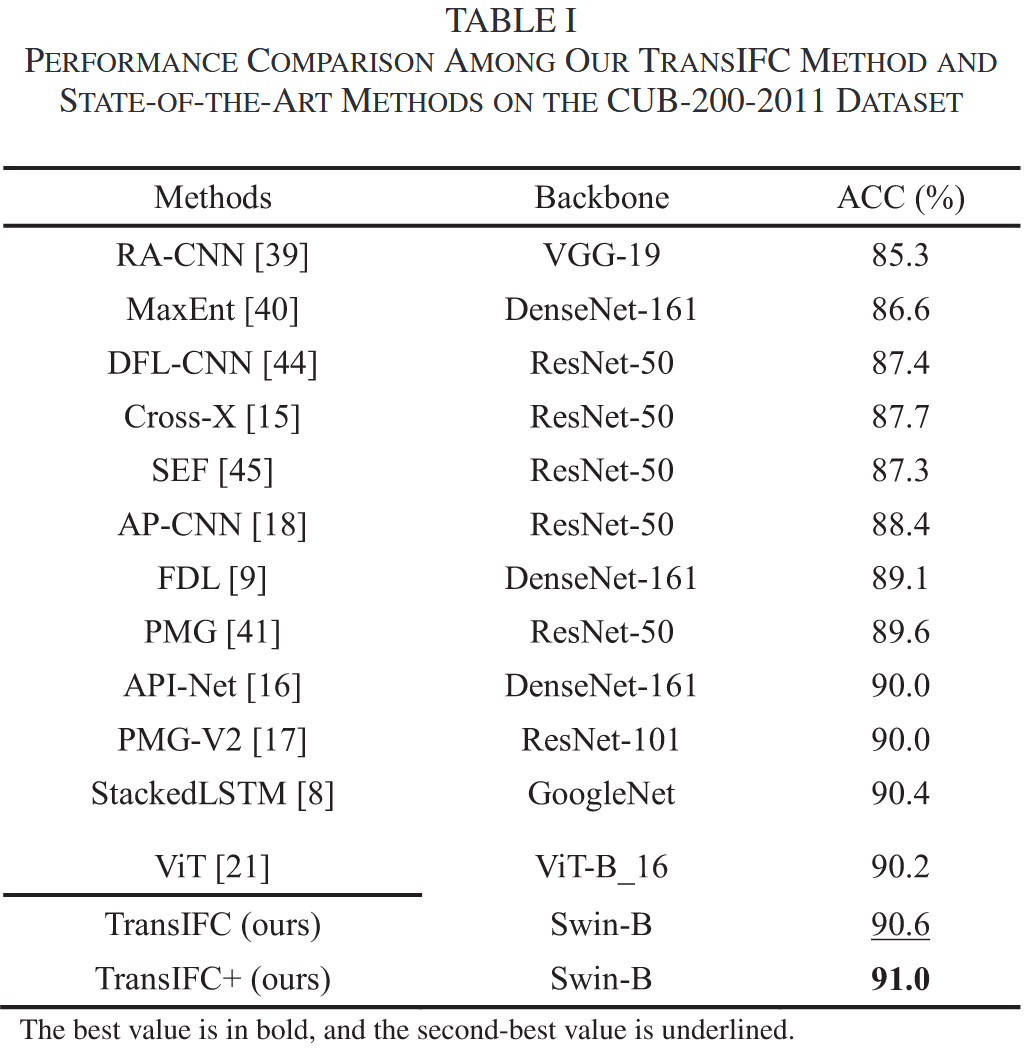
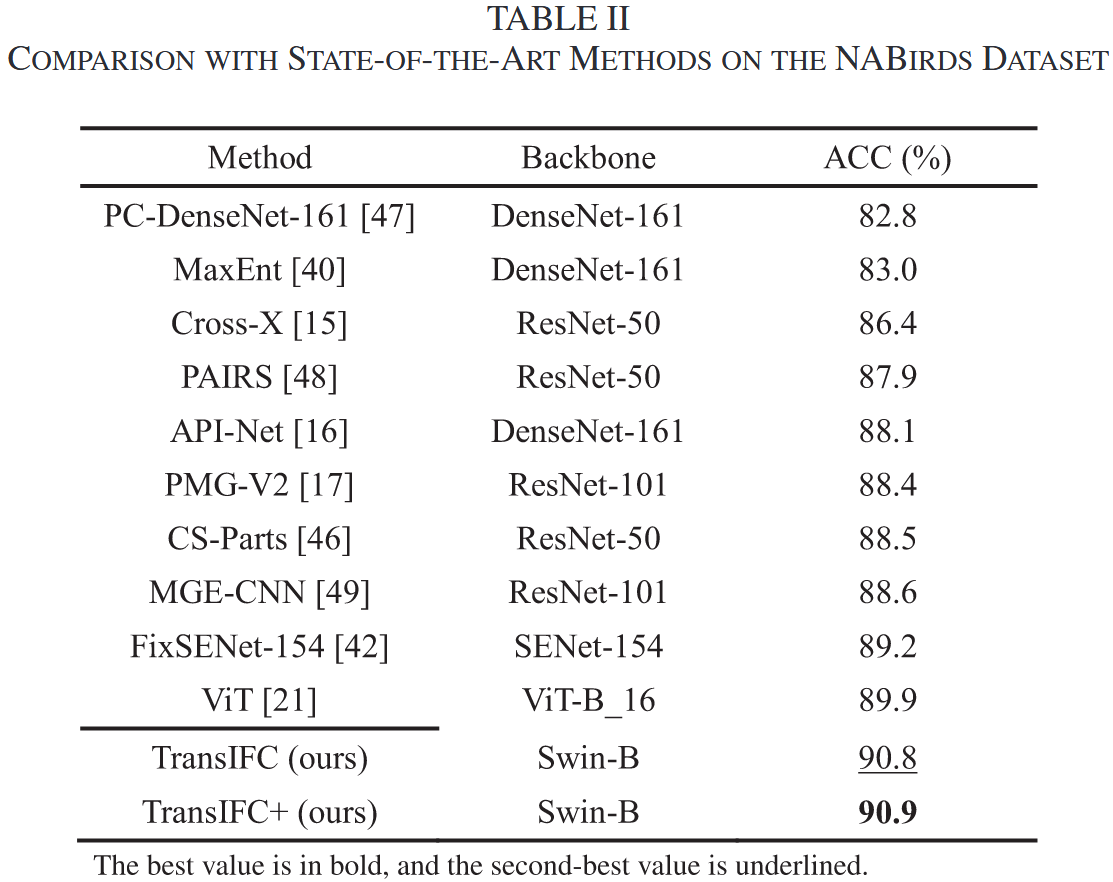
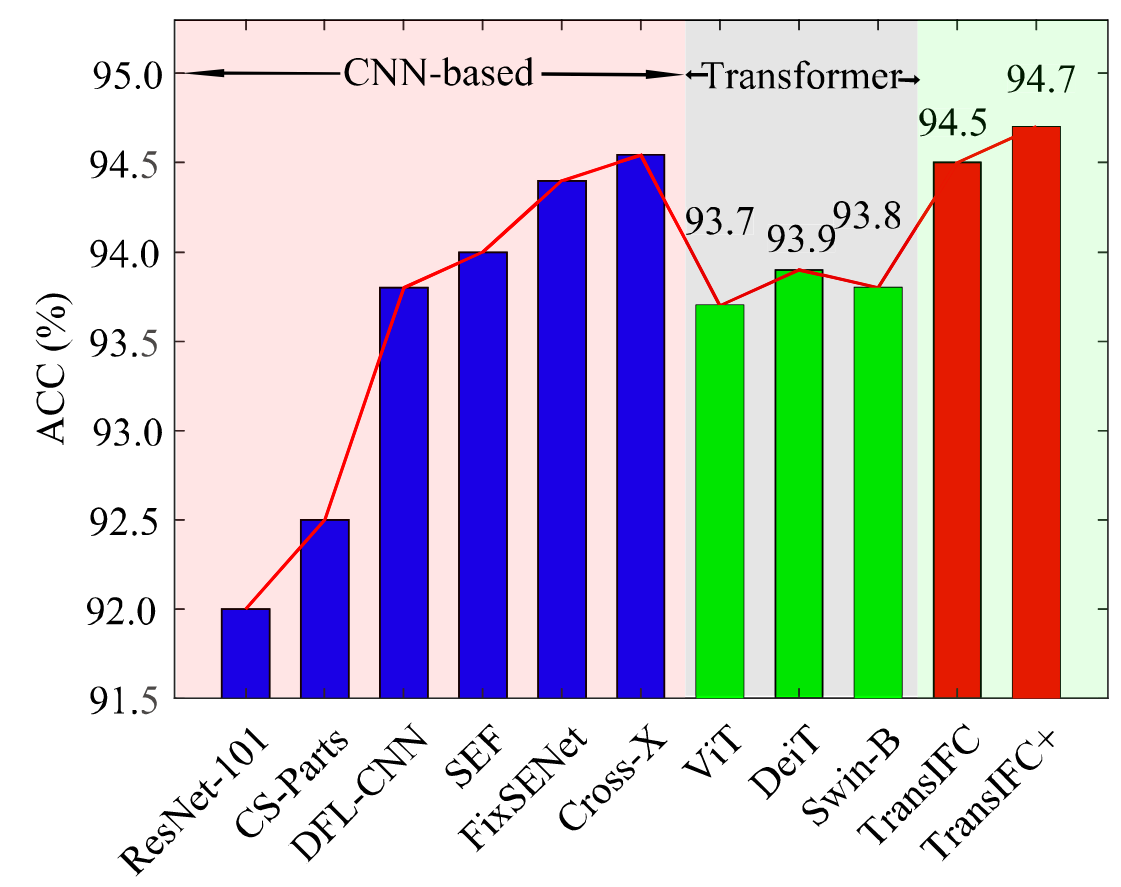
- Transformer-based 方法通常优于 CNN-based 方法。
- TransIFC 相比 SOTA CNN 方法提升了 0.6%。
- TransIFC+ 相比基线 Transformer (ViT) 提升了 1.0%。
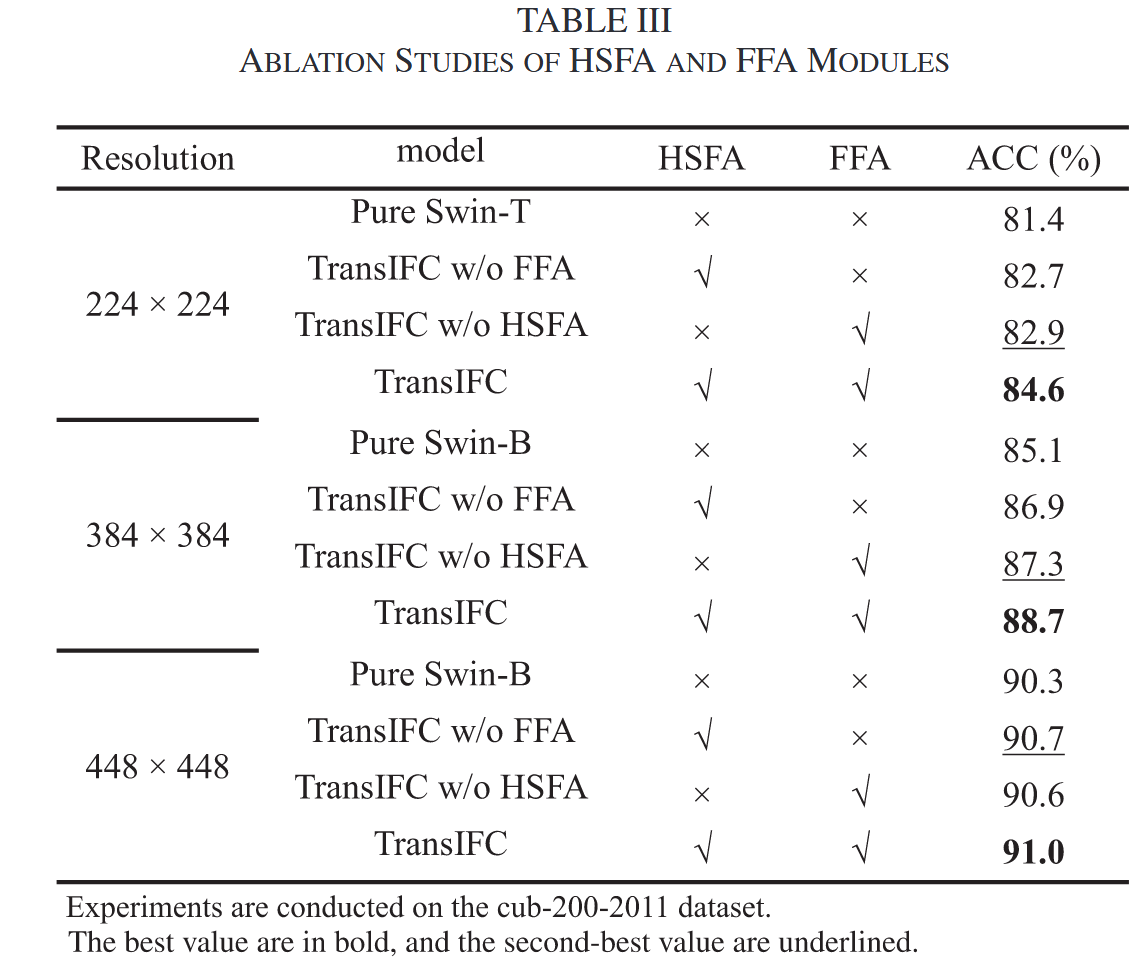
- 证明了 HSFA 和 FFA 模块的有效性。
可视化
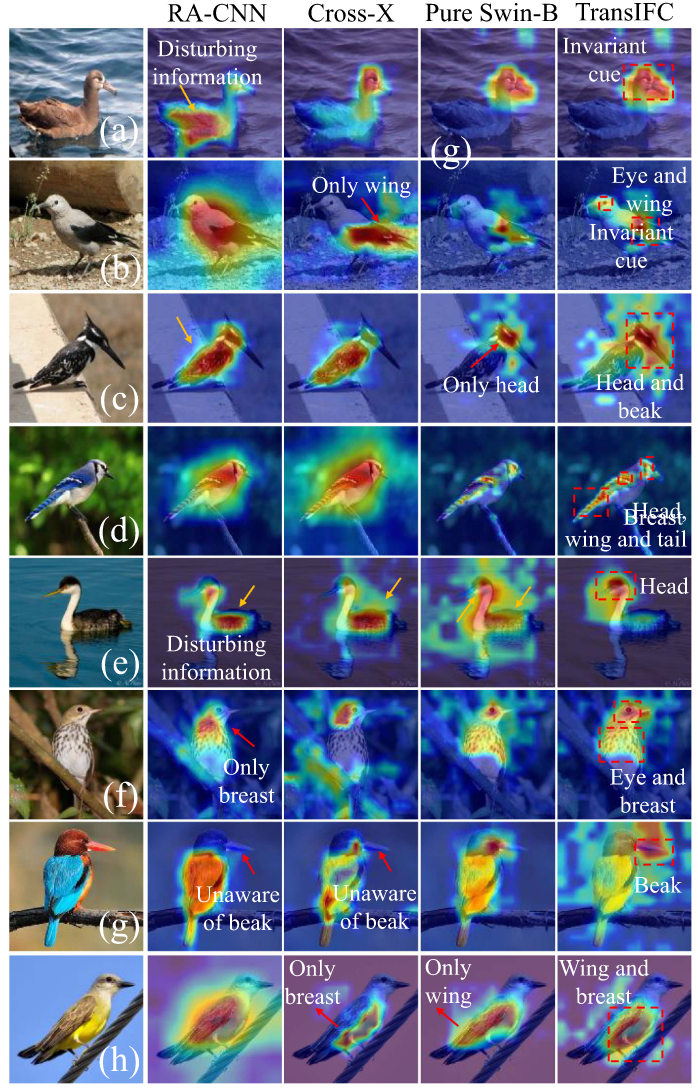
CNN方法 (RA-CNN, Cross-X): 易受干扰信息影响 (黄色箭头),或关注错误区域 (如翅膀)。
Pure Swin-B: 关注头部等关键区域,但可能不够全面。
TransIFC:
能识别头部为核心特征 (红色虚线框)。
能学习长距离依赖关系 (如眼睛与翅膀, 头部与尾部)。
能有效区分细微差异 (如翠鸟的喙, 鹦鹉的翅膀与黄色胸部)。
能忽略背景干扰 (如水面倒影)。
混淆矩阵
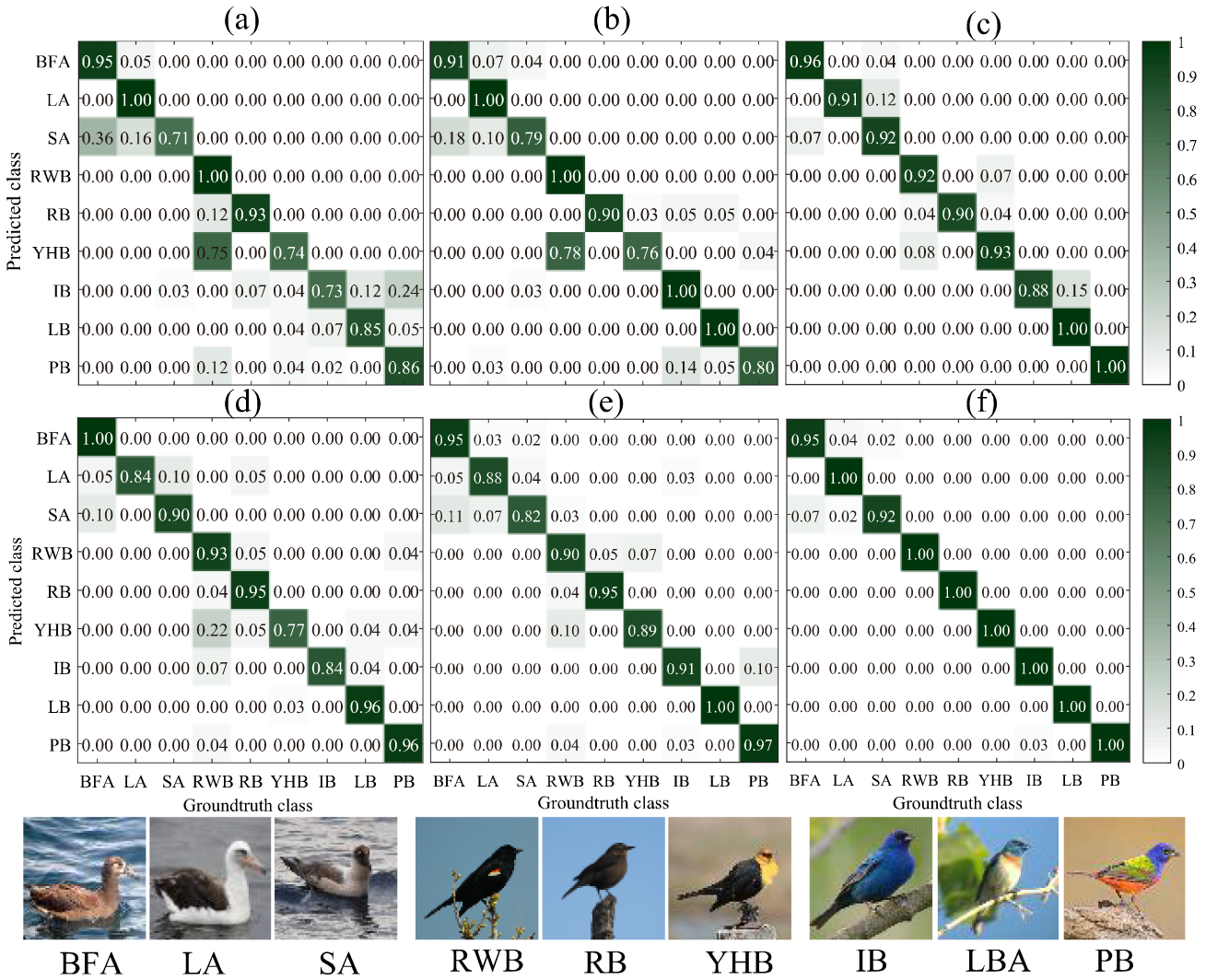
- CNN方法 (a-c): 在相似类别间混淆较多,对角线外颜色较浅。
- Transformer方法 (d-f): 混淆程度相对较低。
- TransIFC (f): 对角线颜色最亮,表明在区分相似类别方面表现最佳。
消融实验
超参数与位置嵌入
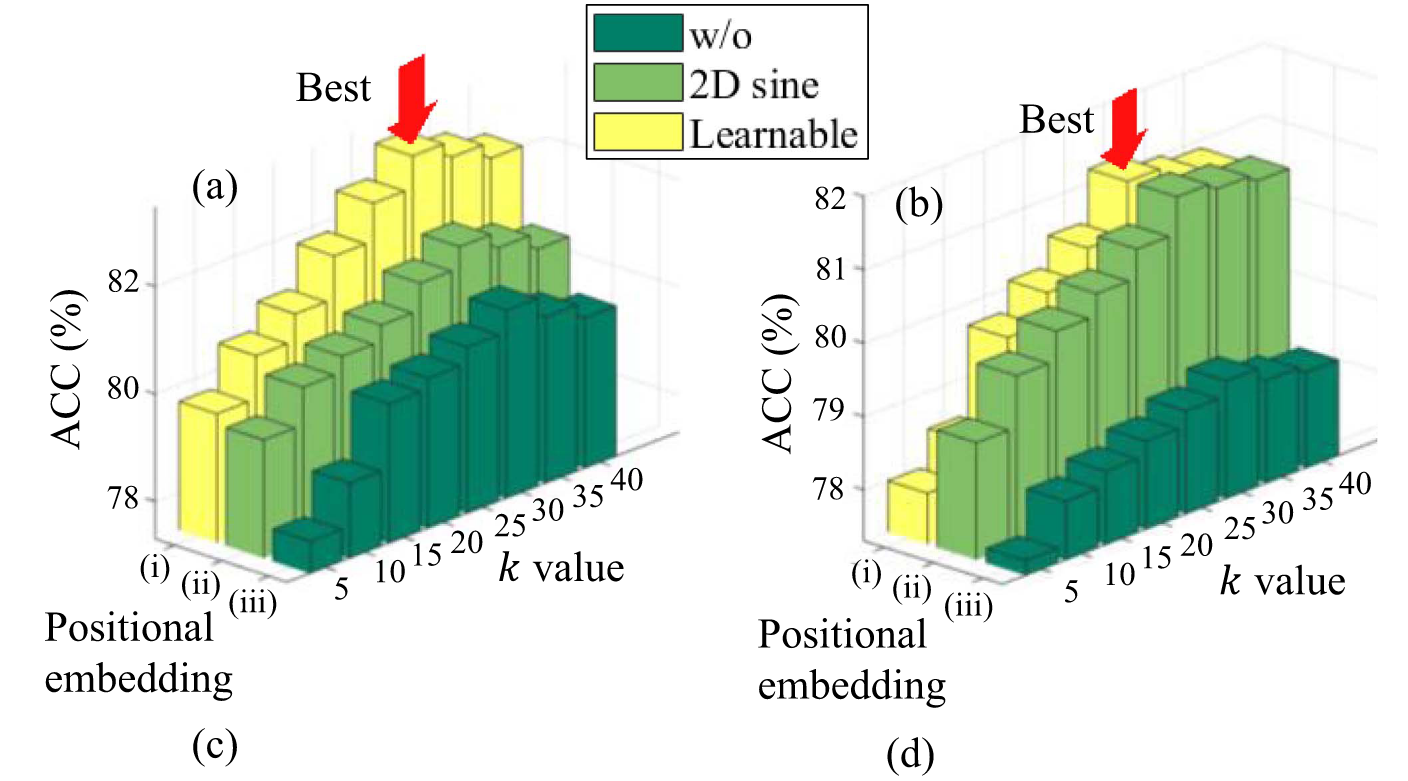
- FFA模块中 k 值 (选择Top-k特征) 的影响。 k 值: 存在最优值,本文选择 k=30。
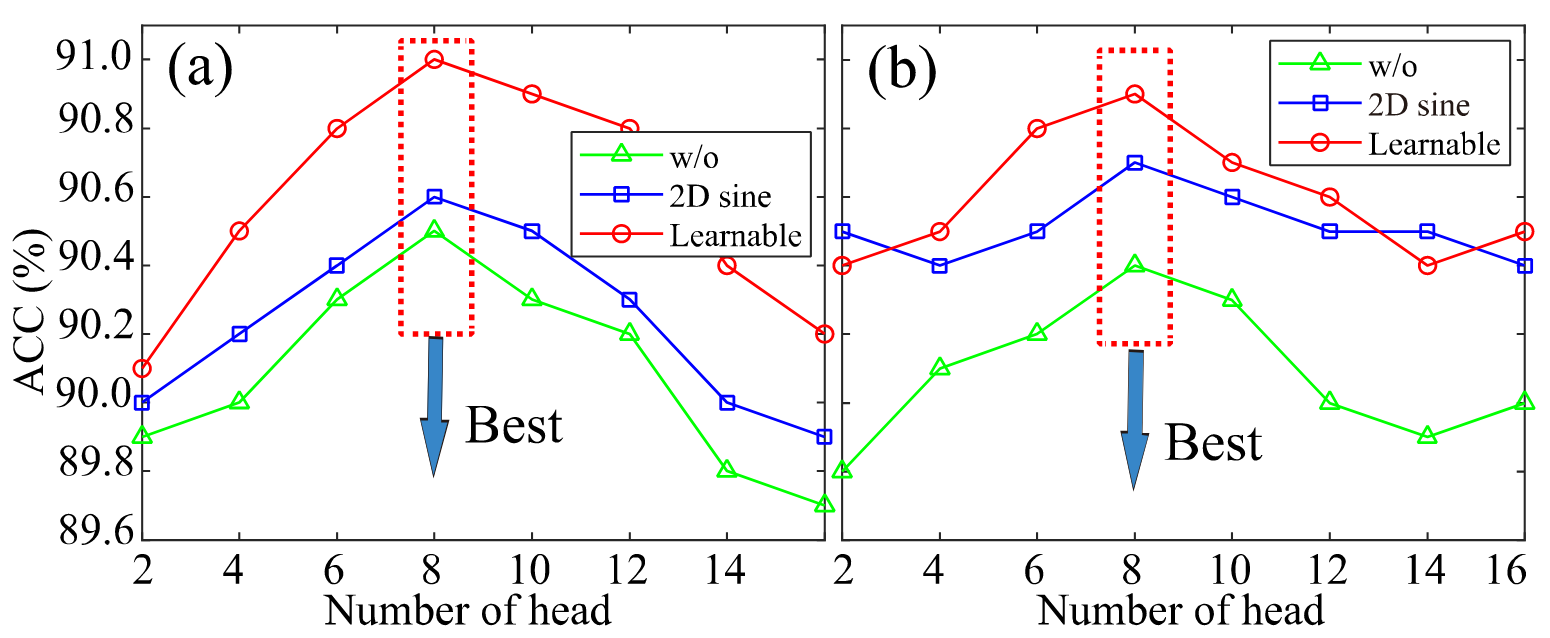
- 自注意力机制中头数 (Head Number) 的影响。头数: 存在最优值,本文选择 8。
- 不同位置嵌入方式的影响 (Learnable, 2D Sine, None)。位置嵌入: 存在重要性,Learnable PE 性能最佳。
HSFA与FFA模块效果
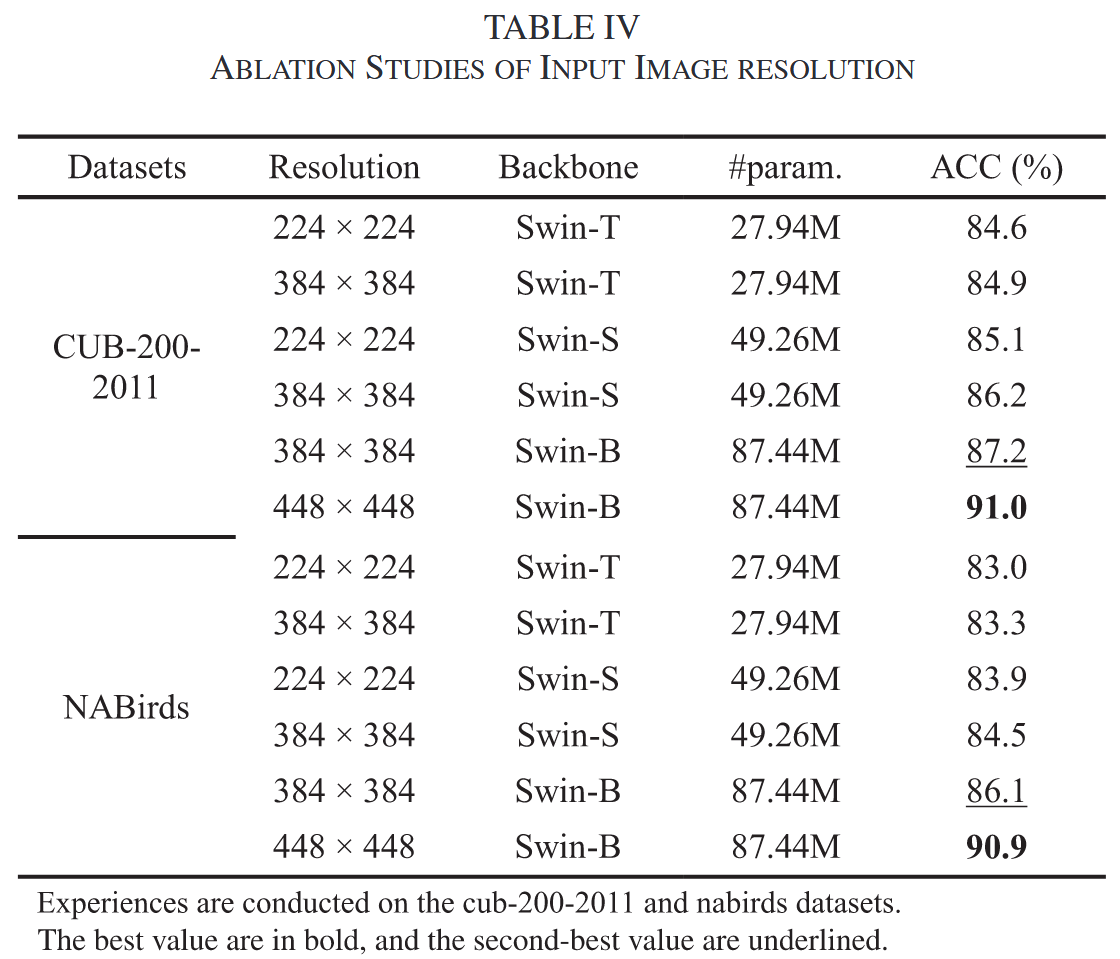
分辨率
提高输入分辨率有助于捕捉更多细节,从而提升分类精度。对于NABirds数据集,高分辨率带来的提升更为显著。
Stanford Cars数据集
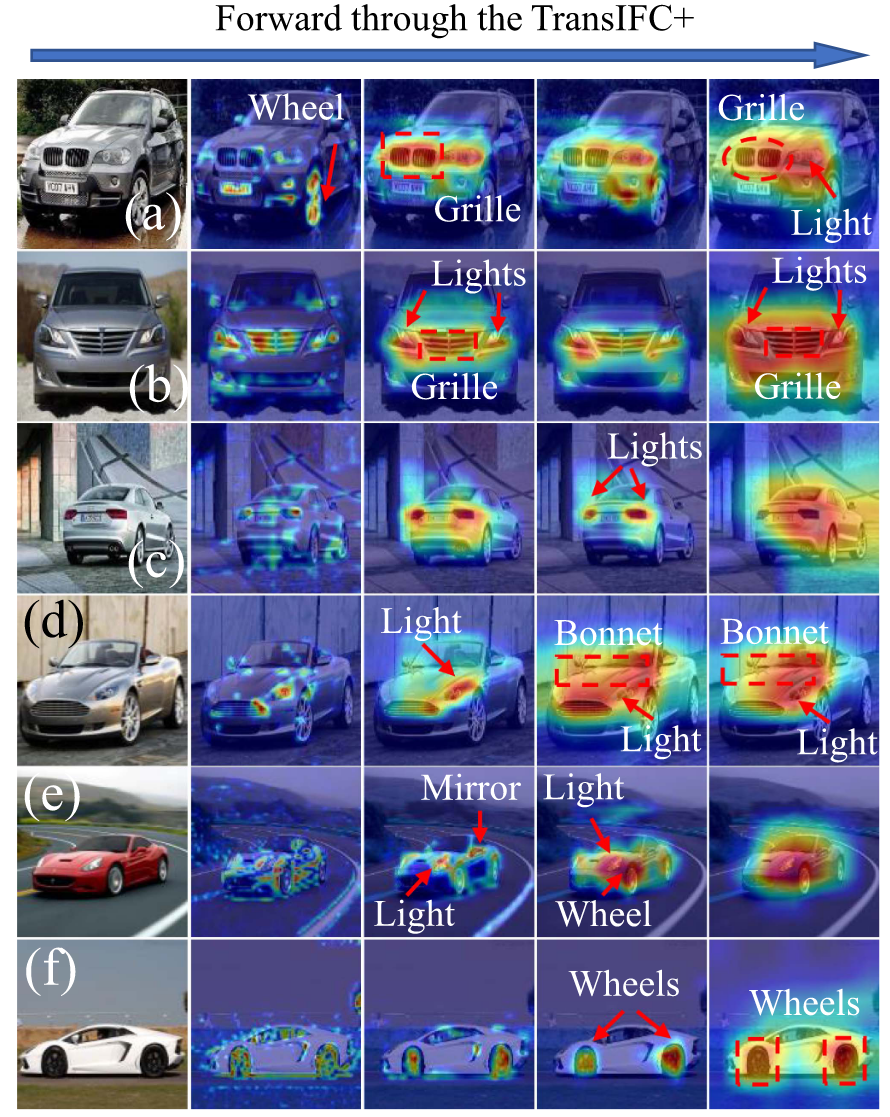
- TransIFC+ 能识别汽车的关键部件 (灯, 格栅, 轮胎)。
- 能学习长距离依赖关系 (两侧车灯, 前后轮)。
- 与鸟类图像类似,汽车识别也依赖于不变线索和长距离关系。
Future
- 更轻量级的版本
- 视频场景下的应用